
SICB 2023 — Joy, Saba, and Yu!


Saba Zerefa, a visiting summer REU student from Harvard, presented her work entitled “Making Sense: Decoding active sensing via tracking behavior in weakly electric fish” for the annual LCSR REU program presentations on Friday August 5, 2022.
Great work!!

Congratulations, Di Cao, for successfully completing your GBO and becoming a PhD Candidate!
It is my pleasure to announce that Di Cao was chosen as a recipient of the JHU Department of Mechanical Engineering’s Creel Family Teaching Assistant Award for the 2020-2021 academic year. Congratulations!

Anoop Bhat conducted an outstanding summer research project on localizing weakly electric fish using a grid of electrodes, building on a published paper and published dataset in our lab. His project and outstanding presentation earned him first place in the 2020 REU LCSR Presentation Awards. He joins a long list of LIMBS Lab REU students to win or get second place at these awards.

Each year, the annual Dynamic Walking Conference continues to be one of my favorite conferences. An incredible mix of smart and creative people. Here I am rambling on about closing the loop on sensorimotor systems. 
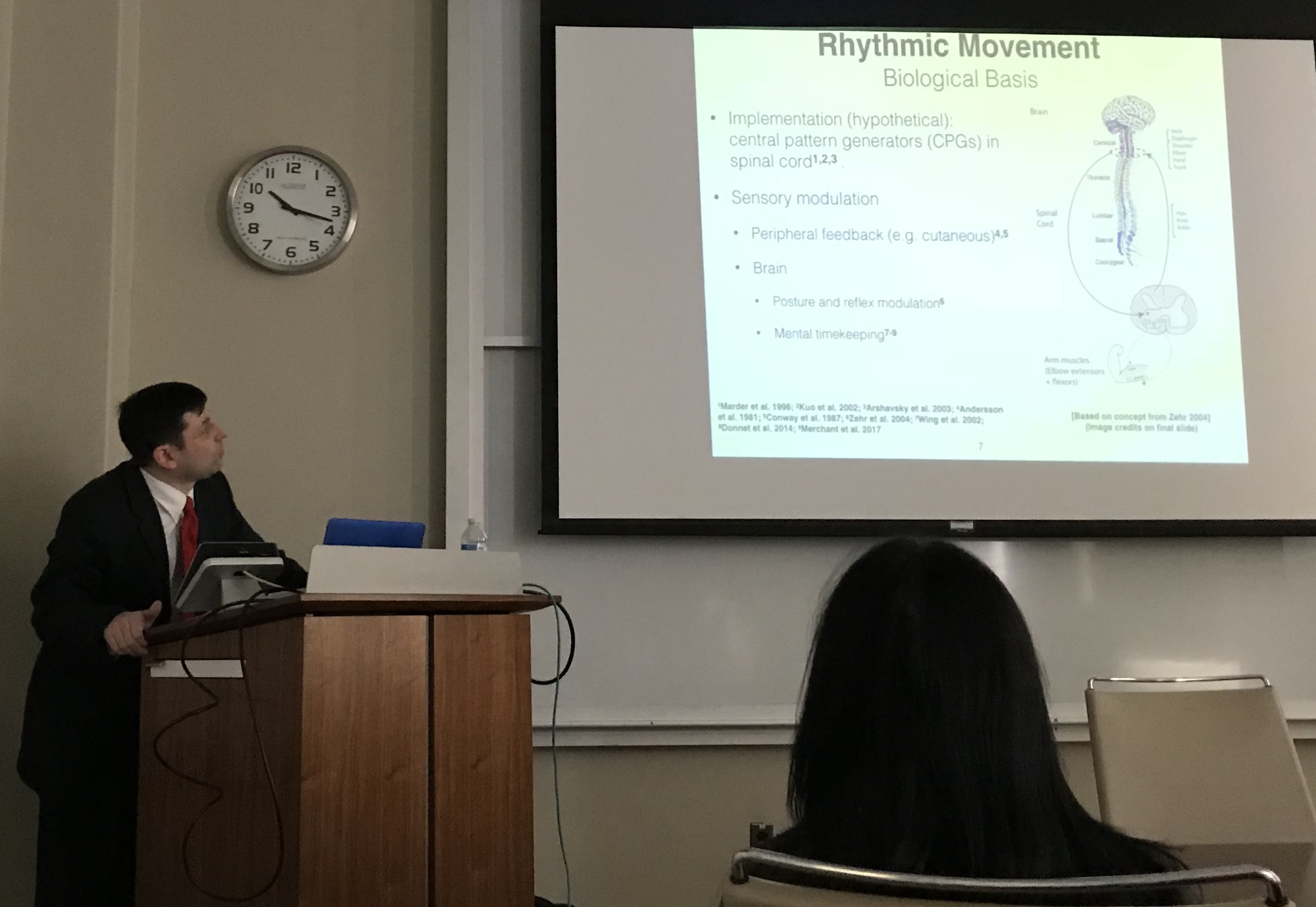
Congratulations to Robert Nickl, who defended his thesis today. Robert’s thesis, entitled “Spatial and Timing Regulation of Upper-Limb Movements in Rhythmic Tasks,” uses a virtual juggling paradigm to investigate multisensory control during rhythmic arm movements.
 On October 16, 2017 LIMBS lab member Amanda Edwards defended her PhD dissertation entitled “Feedback Control in the Cerebellum”. Amanda was jointly co-advised by Dr. Amy Bastian.
On October 16, 2017 LIMBS lab member Amanda Edwards defended her PhD dissertation entitled “Feedback Control in the Cerebellum”. Amanda was jointly co-advised by Dr. Amy Bastian.
Here is Amanda discussing the merits of chasing little red dots as a means by which to get a PhD.
CONGRATS AMANDA!
 In a recent talk at the CMU Robotics Institute, I decided to give a quick impromptu demonstration of what it means to “stabilize an unstable system,” thereby making it easier to apply system identification. This was in relation to my presentation of my previous PhD student Manu Madhav’s paper:
In a recent talk at the CMU Robotics Institute, I decided to give a quick impromptu demonstration of what it means to “stabilize an unstable system,” thereby making it easier to apply system identification. This was in relation to my presentation of my previous PhD student Manu Madhav’s paper:
M. S. Madhav, S. A. Stamper, E. S. Fortune, and N. J. Cowan. “Closed-loop stabilization of the jamming avoidance response reveals its locally unstable and globally nonlinear dynamics”. J Exp Biol, 216:4272-4284, 2013.

Shahin Sefati, Alican Demir, and Mert Ankarali (left to right, Hopkins gold regalia) were hooded today by ME Professor Louis Whitcomb (Yale regalia). Sadly, I am out of town and didn’t get to do it myself, but was very happy that my colleague and academic brother stepped up and did the honors for me!
-Noah