

Publications

Reviews
-
![[PDF]](https://limbs.lcsr.jhu.edu/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://limbs.lcsr.jhu.edu/wp-content/plugins/papercite/img/external.png) J. Mongeau, Y. Yang, I. Escalante, N. J. Cowan, and K. Jayaram, “Moving in an Uncertain World: Robust and Adaptive Control of Locomotion from Organisms to Machine Intelligence,” Integr Comp Biol, p. icae121, 2024.
J. Mongeau, Y. Yang, I. Escalante, N. J. Cowan, and K. Jayaram, “Moving in an Uncertain World: Robust and Adaptive Control of Locomotion from Organisms to Machine Intelligence,” Integr Comp Biol, p. icae121, 2024.
[Bibtex]@article{mongeaumoving2024, author = {Mongeau, Jean-Michel and Yang, Yu and Escalante, Ignacio and Cowan, Noah J. and Jayaram, Kaushik}, title = {Moving in an Uncertain World: Robust and Adaptive Control of Locomotion from Organisms to Machine Intelligence}, journal = {Integr Comp Biol}, pages = {icae121}, year = 2024, month = 08, doi = {10.1093/icb/icae121}, url = {https://doi.org/10.1093/icb/icae121} }
- M. S. Madhav and N. J. Cowan, “The synergy between neuroscience and control theory: the nervous system as inspiration for hard control challenges,” Annu Rev Control Robot Auton Syst, vol. 3, pp. 243-267, 2020.
[Bibtex]@article{madhavsynergy2020, author = {Madhav, Manu S. and Cowan, Noah J.}, title = {The synergy between neuroscience and control theory: the nervous system as inspiration for hard control challenges}, journal = {Annu Rev Control Robot Auton Syst}, year = 2020, volume = 3, pages = {243-267}, doi = {10.1146/annurev-control-060117-104856}, url = {https://doi.org/10.1146/annurev-control-060117-104856} }
- E. Roth, S. Sponberg, and N. J. Cowan, “A Comparative Approach to Closed-Loop Computation,” Curr Opin Neurobiol, vol. 25, pp. 54-62, 2014.
[Bibtex]@Article{rothcomparative2014, author = {Roth, Eatai and Sponberg, Simon and Cowan, Noah J.}, title = {A Comparative Approach to Closed-Loop Computation}, journal = {Curr Opin Neurobiol}, year = 2014, volume = 25, pages = {54-62}, doi = {10.1016/j.conb.2013.11.005}, url = {https://doi.org/10.1016/j.conb.2013.11.005} }
- N. J. Cowan, M. M. Ankarali, J. P. Dyhr, M. S. Madhav, E. Roth, S. Sefati, S. Sponberg, S. A. Stamper, E. S. Fortune, and T. L. Daniel, “Feedback Control as a Framework for Understanding Tradeoffs in Biology,” Integr Comp Biol, vol. 54, iss. 2, pp. 223-237, 2014.
[Bibtex]@article{cowanfeedback2014, author = {Cowan, Noah J. and Ankarali, M. Mert and Dyhr, Jonathan P. and Madhav, Manu S. and Roth, Eatai and Sefati, Shahin and Sponberg, Simon and Stamper, Sarah A. and Fortune, Eric S. and Daniel, Tom L.}, title = {Feedback Control as a Framework for Understanding Tradeoffs in Biology}, journal = {Integr Comp Biol}, volume = 54, number = 2, pages = {223-237}, year = 2014, doi = {10.1093/icb/icu050}, url = {https://doi.org/10.1093/icb/icu050} }
[ Reviews | Preprints | Journal Articles | Conference Papers | Chapters | Theses | Abstracts | LIMBS Dataverse]
Preprints
- D. Cao, N. J. Cowan, and J. S. Freudenberg, “Optimal Estimation with Sensor Delay,” arXiv, 2022.
[Bibtex]@article{caooptimal2022, author = {Cao, Di and Cowan, Noah J. and Freudenberg, James S.}, title = {Optimal Estimation with Sensor Delay}, journal = {arXiv}, doi = {10.48550/ARXIV.2210.12123}, url = {https://arxiv.org/abs/2210.12123}, year = {2022} } - J. Choi, S. Deng, N. Justus, N. J. Cowan, and R. L. Hatton, “The Geometry of Optimal Gait Families for Steering Kinematic Locomoting Systems,” , 2025.
[Bibtex]@article{choigeometry2025, title={The Geometry of Optimal Gait Families for Steering Kinematic Locomoting Systems}, author = {Choi, Jinwoo and Deng, Siming and Justus, Nathan and Cowan, Noah J. and Hatton, Ross L.}, year={2025}, eprint={2502.17672}, doi = {10.48550/arXiv.2502.17672}, url = {https://doi.org/10.48550/arXiv.2502.17672}, archivePrefix={arXiv}, primaryClass={cs.RO} } - D. Cao, M. G. T. Wilkinson, A. J. Bastian, and N. J. Cowan, “Feedback and feedforward control are differentially delayed in cerebellar ataxia,” bioRxiv, 2025.
[Bibtex]@article{coafeedback2025, author = {Cao, Di and Wilkinson, Michael G.T. and Bastian, Amy J. and Cowan, Noah J.}, title = {Feedback and feedforward control are differentially delayed in cerebellar ataxia}, year = {2025}, doi = {10.1101/2025.02.09.637327}, publisher = {Cold Spring Harbor Laboratory}, URL = {https://www.biorxiv.org/content/early/2025/02/10/2025.02.09.637327}, journal = {bioRxiv} } - K. B. Ludlow, S. Dhawan, S. C. Whitehead, H. K. Teoh, E. Ehrhardt, N. Cowan, B. H. Dickerson, and I. Cohen, “A multi-muscular, redundant strategy for free-flight roll stability,” bioRxiv, 2025.
[Bibtex]@article{ludlowmulti-muscular2025, author = {Ludlow, B. Kemper and Dhawan, Serene and Whitehead, Samuel C and Teoh, Han Kheng and Ehrhardt, Erica and Cowan, Noah and Dickerson, Bradley H and Cohen, Itai}, title = {A multi-muscular, redundant strategy for free-flight roll stability}, elocation-id = {2025.09.29.679272}, year = {2025}, doi = {10.1101/2025.09.29.679272}, publisher = {Cold Spring Harbor Laboratory}, URL = {https://www.biorxiv.org/content/early/2025/10/01/2025.09.29.679272.1}, journal = {bioRxiv} } - G. Secer, B. Krishnan, N. J. Cowan, and J. J. Knierim, “Visual landmark coding and dynamic coupling with path integration circuits in area 29e of the rodent parahippocampal cortex,” bioRxiv, 2025.
[Bibtex]@article {secervisual2025, author = {Secer, Gorkem and Krishnan, Bharath and Cowan, Noah J. and Knierim, James J.}, title = {Visual landmark coding and dynamic coupling with path integration circuits in area 29e of the rodent parahippocampal cortex}, elocation-id = {2025.11.11.687899}, year = {2025}, doi = {10.1101/2025.11.11.687899}, URL = {https://www.biorxiv.org/content/early/2025/11/12/2025.11.11.687899}, journal = {bioRxiv} } - E. D. Sontag, D. Biswas, and N. J. Cowan, “An observability result related to active sensing,” arXiv, 2022.
[Bibtex]@article{sontagobservability2022, author = {Sontag, Eduardo D. and Biswas, Debojyoti and Cowan, Noah J.}, title = {An observability result related to active sensing}, journal = {arXiv}, doi = {10.48550/ARXIV.2210.03848}, url = {https://arxiv.org/abs/2210.03848}, year = {2022} } - H. Yeh, Y. Yang, D. Biswas, and N. J. Cowan, “Illumination mediates a switch in both active sensing and control in weakly electric fish,” bioRxiv, 2024.
[Bibtex]@article {yehillumination2024, author = {Yeh, Huanying and Yang, Yu and Biswas, Debojyoti and Cowan, Noah J.}, title = {Illumination mediates a switch in both active sensing and control in weakly electric fish}, year = {2024}, doi = {10.1101/2024.10.15.618597}, publisher = {Cold Spring Harbor Laboratory}, URL = {https://www.biorxiv.org/content/early/2024/10/17/2024.10.15.618597}, journal = {bioRxiv} }
[ Reviews | Preprints | Journal Articles | Conference Papers | Chapters | Theses | Abstracts | LIMBS Dataverse]
Journal Articles
- R. P. Jayakumar, Y. Sueoka, M. K. Ferreyros, B. Y. Li, M. S. Madhav, X. Chen, J. J. Knierim, and N. J. Cowan, “Simultaneous path-integration recalibration in head direction and place cells,” Curr Biol, vol. 36, iss. 7, p. 1644-1658.e5, 2026.
[Bibtex]@Article{jayakumarsimultaneous2026, author = {Jayakumar, Ravikrishnan P. and Sueoka, Yotaro and Ferreyros, Marissa K. and Li, Brian Y. and Madhav, Manu S. and Chen, Xingyu and Knierim, James J. and Cowan, Noah J.}, title = {Simultaneous path-integration recalibration in head direction and place cells}, journal = {Curr Biol}, year = {2026}, volume = {36}, number = {7}, pages = {1644-1658.e5}, doi = {10.1016/j.cub.2026.02.031}, url = {https://doi.org/10.1016/j.cub.2026.02.031}, annotation = {Jayakumar and Sueoka contributed equally; Knierim and Cowan co-supervised equally} } - Y. Yang, A. Oliveira, L. L. Whitcomb, F. Pait, M. Sznaier, and N. J. Cowan, “Modeling Adaptive Tracking of Predictable Stimuli in Electric Fish,” IEEE Control Syst Lett, pp. 1-1, 2025.
[Bibtex]@ARTICLE{yangmodeling2025, author = {Yang, Yu and Oliveira, Andreas and Whitcomb, Louis L. and Pait, Felipe and Sznaier, Mario and Cowan, Noah J.}, journal = {IEEE Control Syst Lett}, title = {Modeling Adaptive Tracking of Predictable Stimuli in Electric Fish}, year = {2025}, volume = {}, number = {}, pages = {1-1}, doi = {10.1109/LCSYS.2025.3647987}, annotation = {Yang and Oliveira contributed equally} } - B. M. Woronowicz, N. C. Graber, S. G. Lashkari, and N. J. Cowan, “Resourcefulness, Robustness, and Recovery: Tail Use during Climbing in Rats,” Integr Comp Biol, vol. 65, iss. 6, pp. 1635-1648, 2025.
[Bibtex]@article{woronowiczresourcefulness2025, title = {Resourcefulness, Robustness, and Recovery: Tail Use during Climbing in Rats}, author = {Woronowicz, Brian M and Graber, Noah C and Lashkari, Shahin G and Cowan, Noah J}, journal = {Integr Comp Biol}, volume = {65}, number = {6}, pages = {1635-1648}, year = {2025}, month = dec, year = {2025}, doi = {10.1093/icb/icaf108}, url = {https://doi.org/10.1093/icb/icaf108} } - K. M. Mills, N. J. Cowan, and M. P. Suver, “Multisensory integration for active mechanosensation in Drosophila flight,” Curr Biol, 2025.
[Bibtex]@article{millsmultisensory2025, author = {Mills, Kevin M and Cowan, Noah J and Suver, Marie P}, title = {Multisensory integration for active mechanosensation in {D}rosophila flight}, year = {2025}, journal = {Curr Biol}, doi = {10.1016/j.cub.2025.11.029}, url = {https://doi.org/10.1016/j.cub.2025.11.029} } - W. P. Olson, V. B. Chokshi, J. J. Kim, N. J. Cowan, and D. H. O’Connor, “Muscle spindles provide flexible sensory feedback for movement sequences,” Cell Rep, vol. 44, iss. 11, p. 116452, 2025.
[Bibtex]@article{olsonmuscle2025, author = {Olson, William P. and Chokshi, Varun B. and Kim, Jeong Jun and Cowan, Noah J. and O'Connor, Daniel H.}, title = {Muscle spindles provide flexible sensory feedback for movement sequences}, year = {2025}, journal = {Cell Rep}, volume = {44}, number = {11}, pages = {116452}, year = {2025}, doi = {10.1016/j.celrep.2025.116452}, url = {https://doi.org/10.1016/j.celrep.2025.116452} } - D. Biswas, E. D. Sontag, and N. J. Cowan, “An exact active sensing strategy for a class of bio-inspired systems,” Euro J Control, vol. 86, p. 101361, 2025.
[Bibtex]@article{biswasexact2025, title = {An exact active sensing strategy for a class of bio-inspired systems}, author = {Biswas, Debojyoti and Sontag, Eduardo D. and Cowan, Noah J.}, journal = {Euro J Control}, pages = {101361}, volume = {86}, year = {2025}, doi = {10.1016/j.ejcon.2025.101361}, url = {https://doi.org/10.1016/j.ejcon.2025.101361}, note = {Special Issue on the European Control Conference 2025} } - Y. Sueoka, R. P. Jayakumar, M. S. Madhav, F. Savelli, N. J. Cowan, and J. J. Knierim, “Allothetic and idiothetic spatial cues control the multiplexed theta phase coding of place cells,” Nat Neurosci, vol. 28, iss. 10, p. 2106–2117, 2025.
[Bibtex]@Article{sueokaallothetic2025, author = {Sueoka, Yotaro and Jayakumar, Ravikrishnan P. and Madhav, Manu S. and Savelli, Francesco and Cowan, Noah J. and Knierim, James J.}, title = {Allothetic and idiothetic spatial cues control the multiplexed theta phase coding of place cells}, journal = {Nat Neurosci}, year = {2025}, volume = 28, number = 10, pages = {2106--2117}, doi = {10.1038/s41593-025-02038-6}, url = {https://doi.org/10.1038/s41593-025-02038-6}, annotation = {Cowan and Knierim co-supervised equally} } - G. Secer, J. J. Knierim, and N. J. Cowan, “Explicit error coding can mediate gain recalibration in continuous bump attractor networks,” Nat Commun, vol. 16, iss. 9215, 2025.
[Bibtex]@article {secerexplicit2025, author = {Secer, Gorkem and Knierim, James J. and Cowan, Noah J.}, title = {Explicit error coding can mediate gain recalibration in continuous bump attractor networks}, journal = {Nat Commun}, year = {2025}, volume = {16}, number = {9215}, doi = {10.1038/s41467-025-63817-0}, url = {https://doi.org/10.1038/s41467-025-63817-0}, annotation = {Knierim and Cowan co-supervised equally} } - K. Oh, D. Cao, N. Cowan, and A. J. Bastian, “Cerebellar Reaching Ataxia is Exacerbated by Timing Demands and Assistive Interaction Torques,” Sci Rep, vol. 15, iss. 1, p. 22129, 2025.
[Bibtex]@article{ohcerebellar2025, author = {Oh, Kyunggeune and Cao, Di and Cowan, Noah and Bastian, Amy J}, title = {Cerebellar Reaching Ataxia is Exacerbated by Timing Demands and Assistive Interaction Torques}, year = {2025}, journal = {Sci Rep}, volume = {15}, number = {1}, pages = {22129}, doi = {10.1038/s41598-025-03731-z}, url = {https://doi.org/10.1038/s41598-025-03731-z} } - M. G. T. Wilkinson, X. Wang, N. J. Cowan, and C. F. Moss, “Echolocating bats adjust sonar call features and head/ear position as they track moving targets in the presence of clutter,” J Acoust Soc Am, vol. 157, iss. 3, pp. 2236-2247, 2025.
[Bibtex]@article{wilkinsonecholocating2025, author = {Wilkinson, Michael G.T. and Wang, XingYao and Cowan, Noah J. and Moss, Cynthia F.}, title = {Echolocating bats adjust sonar call features and head/ear position as they track moving targets in the presence of clutter}, journal = {J Acoust Soc Am}, volume = {157}, number = {3}, pages = {2236-2247}, year = {2025}, month = mar, doi = {10.1121/10.0036252}, url = {https://doi.org/10.1121/10.0036252} } - J. Carducci, N. J. Cowan, and J. D. Brown, “Teleoperator Coupling Dynamics Impact Human Motor Control Across Pursuit Tracking Speeds,” IEEE Trans Haptics, vol. 18, iss. 1, pp. 20-31, 2025.
[Bibtex]@Article{carducciteleoperator2025, author = {Carducci, Jacob and Cowan, Noah J. and Brown, Jeremy D.}, title = {Teleoperator Coupling Dynamics Impact Human Motor Control Across Pursuit Tracking Speeds}, journal = {IEEE Trans Haptics}, volume = {18}, number = {1}, pages = {20-31}, doi = {10.1109/TOH.2025.3546522}, url = {https://doi.org/10.1109/TOH.2025.3546522}, year = {2025} } - R. Shi, K. Chen, J. Fern, S. Deng, Y. Liu, D. Scalise, Q. Huang, N. J. Cowan, D. H. Gracias, and R. Schulman, “Programming gel automata shapes using DNA instructions,” Nat Commun, vol. 15, iss. 1, p. 7773, 2024.
[Bibtex]@article{shiprogramming2024, author = {Shi, Ruohong and Chen, Kuan-Lin and Fern, Joshua and Deng, Siming and Liu, Yixin and Scalise, Dominic and Huang, Qi and Cowan, Noah J. and Gracias, David H. and Schulman, Rebecca}, title = {Programming gel automata shapes using DNA instructions}, journal = {Nat Commun}, doi = {10.1038/s41467-024-51198-9}, url = {https://doi.org/10.1038/s41467-024-51198-9}, number = {1}, pages = {7773}, volume = {15}, year = {2024} } - Y. Yang, D. G. Yared, E. S. Fortune, and N. J. Cowan, “Sensorimotor adaptation to destabilizing dynamics in weakly electric fish,” Curr Biol, vol. 34, iss. 10, pp. 2118-2131, 2024.
[Bibtex]@article {yangsensorimotor2024, author = {Yang, Yu and Yared, Dominic G. and Fortune, Eric S. and Cowan, Noah J.}, title = {Sensorimotor adaptation to destabilizing dynamics in weakly electric fish}, year = {2024}, volume = 34, number = 10, month = May, pages = {2118-2131}, journal = {Curr Biol}, doi = {10.1016/j.cub.2024.04.019}, url = {https://doi.org/10.1016/j.cub.2024.04.019} } - M. S. Madhav, R. P. Jayakumar, B. Y. Li, S. G. Lashkari, K. Wright, F. Savelli, J. J. Knierim, and N. J. Cowan, “Control and recalibration of path integration in place cells using optic flow,” Nat Neurosci, vol. 27, iss. 8, p. 1599–1608, 2024.
[Bibtex]@article{madhavcontrol2024, author = {Madhav, Manu S. and Jayakumar, Ravikrishnan P. and Li, Brian Y. and Lashkari, Shahin G. and Wright, Kelly and Savelli, Francesco and Knierim, James J. and Cowan, Noah J.}, title = {Control and recalibration of path integration in place cells using optic flow}, doi = {10.1038/s41593-024-01681-9}, url = {https://doi.org/10.1038/s41593-024-01681-9}, journal = {Nat Neurosci}, number = {8}, pages = {1599--1608}, volume = {27}, year = {2024}, annotation = {Madhav and Jayakumar contributed equally; Knierim and Cowan co-supervised equally} } - D. Biswas, A. Lamperski, Y. Yang, K. Hoffman, J. Guckenheimer, E. S. Fortune, and N. J. Cowan, “Mode switching in organisms for solving explore-versus-exploit problems,” Nat Mach Intell, vol. 5, iss. 11, p. 1285–1296, 2023.
[Bibtex]@article{biswasmode2023, author = {Biswas, Debojyoti and Lamperski, Andrew and Yang, Yu and Hoffman, Kathleen and Guckenheimer, John and Fortune, Eric S. and Cowan, Noah J.}, title = {Mode switching in organisms for solving explore-versus-exploit problems}, year = {2023}, journal = {Nat Mach Intell}, volume = 5, number = 11, pages = {1285--1296}, doi = {10.1038/s42256-023-00745-y}, URL = {https://doi.org/10.1038/s42256-023-00745-y} } - S. C. Whitehead, S. Leone, T. Lindsay, M. R. Meiselman, N. J. Cowan, M. H. Dickinson, N. Yapici, D. L. Stern, T. Shirangi, and I. Cohen, “Neuromuscular embodiment of feedback control elements in Drosophila flight,” Sci Adv, vol. 8, iss. 50, p. eabo7461, 2022.
[Bibtex]@Article{whiteheadneuromuscular2022, author = {Whitehead, Samuel C. and Leone, Sofia and Lindsay, Theodore and Meiselman, Matthew R. and Cowan, Noah J. and Dickinson, Michael H. and Yapici, Nilay and Stern, David L. and Shirangi, Troy and Cohen, Itai}, title = {Neuromuscular embodiment of feedback control elements in {D}rosophila flight}, journal = {Sci Adv}, volume = {8}, number = {50}, pages = {eabo7461}, year = {2022}, doi = {10.1126/sciadv.abo7461}, URL = {https://doi.org/10.1126/sciadv.abo7461} } - A. Pantula, B. Datta, Y. Shi, M. Wang, J. Liu, S. Deng, N. J. Cowan, T. D. Nguyen, and D. H. Gracias, “Untethered unidirectionally crawling gels driven by an asymmetry in contact forces,” Sci Robot, vol. 7, iss. 73, p. eadd2903, 2022.
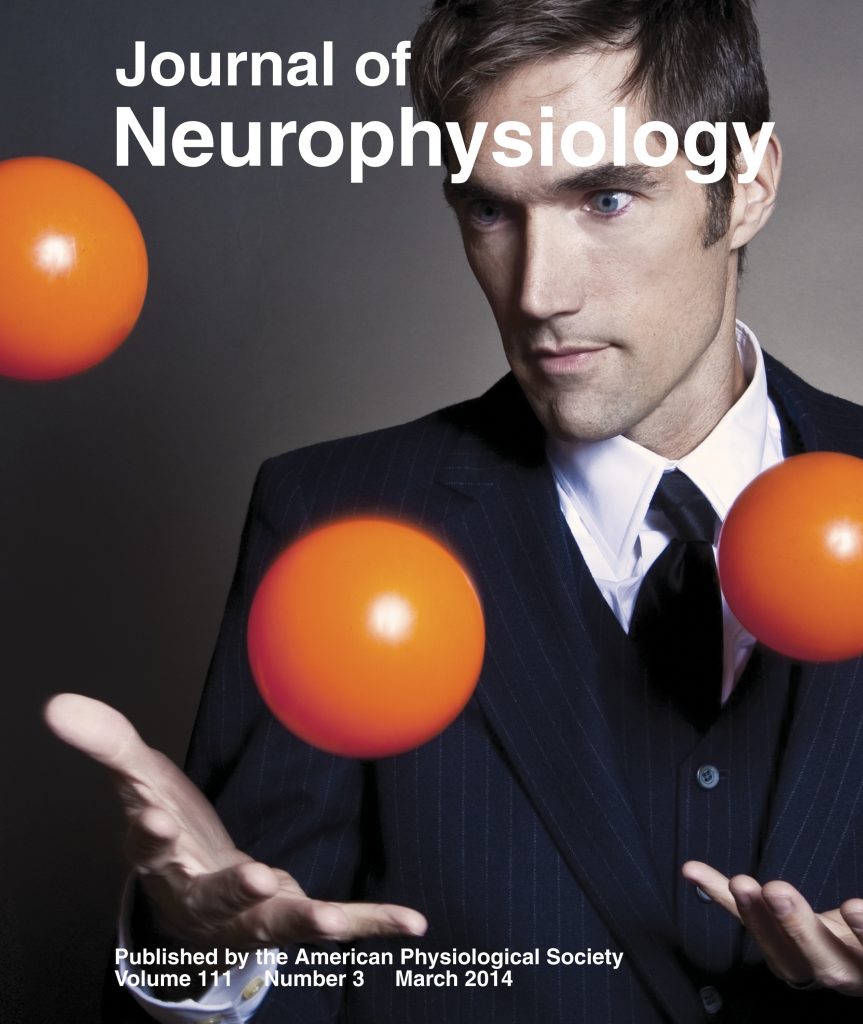
[Bibtex]@Article{pantulauntethered2022, author = {Pantula, Aishwarya and Datta, Bibekananda and Shi, Yupin and Wang, Margaret and Liu, Jiayu and Deng, Siming and Cowan, Noah J. and Nguyen, Thao D. and Gracias, David H.}, title = {Untethered unidirectionally crawling gels driven by an asymmetry in contact forces}, journal = {Sci Robot}, pages = {eadd2903}, volume = {7}, number = {73}, year = 2022, doi = {10.1126/scirobotics.add2903}, url = {https://doi.org/10.1126/scirobotics.add2903} } - C. S. Yang, N. J. Cowan, and A. M. Haith, “Control becomes habitual early on when learning a novel motor skill,” J Neurophysiol, vol. 128, iss. 5, pp. 1278-1291, 2022.
[Bibtex]@article{yangcontrol2022, author = {Yang, Christopher S. and Cowan, Noah J. and Haith, Adrian M.}, title = {Control becomes habitual early on when learning a novel motor skill}, journal = {J Neurophysiol}, volume = {128}, number = {5}, pages = {1278-1291}, year = {2022}, doi = {10.1152/jn.00273.2022}, pmid =36222408, url = {https://doi.org/10.1152/jn.00273.2022} } - T. Raab, M. S. Madhav, R. P. Jayakumar, J. Henninger, N. J. Cowan, and J. Benda, “Advances in non-invasive tracking of wave-type electric fish in natural and laboratory settings,” Front Integr Neurosci, vol. 16, p. 965211, 2022.
[Bibtex]@article{raabadvances2022, author = {Raab, Till and Madhav, Manu S. and Jayakumar, Ravikrishnan P. and Henninger, J\"org and Cowan, Noah J. and Benda, Jan}, title = {Advances in non-invasive tracking of wave-type electric fish in natural and laboratory settings}, journal = {Front Integr Neurosci}, volume = {16}, pages = {965211}, doi = {10.3389/fnint.2022.965211}, url = {https://doi.org/10.3389/fnint.2022.965211}, year = 2022 } - B. P. Vagvolgyi, R. P. Jayakumar, M. S. Madhav, J. J. Knierim, and N. J. Cowan, “Wide-angle, monocular head tracking using passive markers,” J Neurosci Methods, vol. 368, p. 109453, 2022.
[Bibtex]@article{vagvolgyiwide-angle2022, author = {Vagvolgyi, Balazs P. and Jayakumar, Ravikrishnan P. and Madhav, Manu S. and Knierim, James J. and Cowan, Noah J.}, title = {Wide-angle, monocular head tracking using passive markers}, journal = {J Neurosci Methods}, volume = {368}, pages = {109453}, doi = {10.1016/j.jneumeth.2021.109453}, url = {https://doi.org/10.1016/j.jneumeth.2021.109453}, year = 2022 } - M. S. Madhav, R. P. Jayakumar, S. G. Lashkari, F. Savelli, H. T. Blair, J. J. Knierim, and N. J. Cowan, “The Dome: a virtual reality apparatus for freely locomoting rodents,” J Neurosci Methods, vol. 368, p. 109336, 2022.
[Bibtex]@article{madhavdome2022, author = {Madhav, Manu S. and Jayakumar, Ravikrishnan P. and Lashkari, Shahin G. and Savelli, Francescco and Blair, Hugh T. and Knierim, James J. and Cowan, Noah J.}, title = {The Dome: a virtual reality apparatus for freely locomoting rodents}, journal = {J Neurosci Methods}, volume = {368}, pages = {109336}, doi = {10.1016/j.jneumeth.2021.109336}, url = {https://doi.org/10.1016/j.jneumeth.2021.109336}, year = 2022 } - C. S. Yang, N. J. Cowan, and A. M. Haith, “De novo learning versus adaptation of continuous control in a manual tracking task,” eLife, vol. 10, p. e62578, 2021.
[Bibtex]@article{yangdenovo2021, author = {Yang, Christopher S. and Cowan, Noah J. and Haith, Adrian M.}, title = {De novo learning versus adaptation of continuous control in a manual tracking task}, journal = {eLife}, volume = 10, pages = {e62578}, doi = {10.7554/eLife.62578}, url = {https://doi.org/10.7554/eLife.62578}, year = 2021 } - E. S. Fortune, N. Andanar, M. S. Madhav, R. P. Jayakumar, N. J. Cowan, M. E. Bichuette, and D. Soares, “Spooky interaction at a distance in cave and surface dwelling electric fishes,” Front Integr Neurosci, vol. 14, 2020.
[Bibtex]@article{fortunespooky2020, author = {Fortune, Eric S. and Andanar, Nicole and Madhav, Manu S. and Jayakumar, Ravikrishnan P. and Cowan, Noah J. and Bichuette, Maria E. and Soares, Daphne}, title = {Spooky interaction at a distance in cave and surface dwelling electric fishes}, journal = {Front Integr Neurosci}, volume = 14, doi = {10.3389/fnint.2020.561524}, url = {https://doi.org/10.3389/fnint.2020.561524}, year = 2020 } - E. E. Sutton, B. Fuerst, R. Ghotbi, N. J. Cowan, and N. Navab, “Biologically Inspired Catheter for Endovascular Sensing and Navigation,” Sci Rep, vol. 10, iss. 1, p. 5643, 2020.
[Bibtex]@article{suttonbiologically2020, author = {Sutton, Erin E. and Fuerst, Bernhard and Ghotbi, Reza and Cowan, Noah J. and Navab, Nassir}, title = {Biologically Inspired Catheter for Endovascular Sensing and Navigation}, journal = {Sci Rep}, number = 1, volume = 10, year = 2020, pages = {5643}, doi = {10.1038/s41598-020-62360-w}, url = {https://doi.org/10.1038/s41598-020-62360-w} } - A. M. Zimmet, D. Cao, A. J. Bastian, and N. J. Cowan, “Cerebellar patients have intact feedback control that can be leveraged to improve reaching,” eLife, vol. 9, p. e53246, 2020.
[Bibtex]@article{zimmetcerebellar2020, title = {Cerebellar patients have intact feedback control that can be leveraged to improve reaching}, journal = {eLife}, author = {Zimmet, Amanda M. and Cao, Di and Bastian, Amy J. and Cowan, Noah J.}, year = {2020}, volume = {9}, pages = {e53246}, doi = {10.7554/eLife.53246}, url = {https://doi.org/10.7554/eLife.53246} } - I. Uyanik, S. Sefati, S. A. Stamper, K. Cho, M. M. Ankarali, E. S. Fortune, and N. J. Cowan, “Variability in locomotor dynamics reveals the critical role of feedback in task control,” eLife, vol. 9, p. e51219, 2020.
[Bibtex]@article{uyanikvariability2020, title = {Variability in locomotor dynamics reveals the critical role of feedback in task control}, journal = {eLife}, author = {Uyanik, Ismail and Sefati, Shahin and Stamper, Sarah A. and Cho, Kyoung-A and Ankarali, M. M. and Fortune, Eric S. and Cowan, Noah J.}, year = {2020}, volume = {9}, pages = {e51219}, doi = {10.7554/eLife.51219}, url = {https://doi.org/10.7554/eLife.51219} } - R. W. Nickl, M. M. Ankarali, and N. J. Cowan, “Complementary spatial and timing control in rhythmic arm movements,” J Neurophysiol, vol. 121, iss. 4, p. 1543–1560, 2019.
[Bibtex]@article{nicklcomplementary2019, title = {Complementary spatial and timing control in rhythmic arm movements}, journal = {J Neurophysiol}, author = {Nickl, Robert W. and Ankarali, M. M. and Cowan, Noah J.}, year = 2019, pages = {1543--1560}, number = 4, volume = 121, doi = {10.1152/jn.00194.2018}, url = {https://doi.org/10.1152/jn.00194.2018} } - I. Uyanik, S. A. Stamper, N. J. Cowan, and E. S. Fortune, “Sensory Cues Modulate Smooth Pursuit and Active Sensing Movements,” Front Behav Neurosci, vol. 13, iss. 59, 2019.
[Bibtex]@article{uyaniksensory2019, author = {Uyanik, Ismail and Stamper, Sarah A. and Cowan, Noah J. and Fortune, Eric S.}, title = {Sensory Cues Modulate Smooth Pursuit and Active Sensing Movements}, journal = {Front Behav Neurosci}, year = 2019, volume = 13, number = 59, doi = {10.3389/fnbeh.2019.00059}, url = {https://doi.org/10.3389/fnbeh.2019.00059} } - R. P. Jayakumar, M. S. Madhav, F. Savelli, H. T. Blair, N. J. Cowan, and J. J. Knierim, “Recalibration of path integration in hippocampal place cells,” Nature, vol. 566, iss. 745, p. 533–537, 2019.
[Bibtex]@article{jayakumarrecalibration2019, title = {Recalibration of path integration in hippocampal place cells}, author = {Jayakumar, Ravikrishnan P. and Madhav, Manu S. and Savelli, Francesco and Blair, Hugh T. and Cowan, Noah J. and Knierim, James J.}, journal = {Nature}, volume = 566, number = 745, pages = {533--537}, pmid = 30742074, year = 2019, doi = {10.1038/s41586-019-0939-3}, url = {https://doi.org/10.1038/s41586-019-0939-3}, annotation = {Jayakumar and Madhav contributed equally; Cowan and Knierim co-supervised equally} } - D. Biswas, L. A. Arend, S. A. Stamper, B. P. Vágvölgyi, E. S. Fortune, and N. J. Cowan, “Closed-Loop Control of Active Sensing Movements Regulates Sensory Slip,” Curr Biol, vol. 28, iss. 4, 2018.
[Bibtex]@article{biswasclosed-loop2018, title = {Closed-Loop Control of Active Sensing Movements Regulates Sensory Slip}, author = {Biswas, Debojyoti and Arend, Luke A. and Stamper, Sarah A. and V\'{a}gv\"{o}lgyi, Bal\'{a}zs P. and Fortune, Eric S. and Cowan, Noah J.}, journal = {Curr Biol}, year = 2018, volume = 28, number = 4, pmid = 30503617, doi = {10.1016/j.cub.2018.11.002}, url = {https://doi.org/10.1016/j.cub.2018.11.002} } - I. Uyanik, U. Saranli, M. M. Ankarali, N. J. Cowan, and O. Morgul, “Frequency-Domain Subspace Identification of Linear Time Periodic (LTP) Systems,” IEEE Trans Autom Control, vol. 64, iss. 6, p. 2529–2536, 2018.
[Bibtex]@article{uyanikfrequency-domain2018, author = {Uyanik, I. and Saranli, U. and Ankarali, M. M. and Cowan, N. J. and Morgul, O.}, journal = {IEEE Trans Autom Control}, title = {Frequency-Domain Subspace Identification of Linear Time Periodic ({LTP}) Systems}, year = 2018, volume = 64, number = 6, pages = {2529--2536}, doi = {10.1109/TAC.2018.2867360}, url = {https://doi.org/10.1109/TAC.2018.2867360} } - A. M. Zimmet, N. J. Cowan, and A. J. Bastian, “Patients with cerebellar ataxia do not benefit from limb weights,” Cerebellum, vol. 18, iss. 1, 2018.
[Bibtex]@Article{zimmetpatients2018, author = {Zimmet, Amanda M. and Cowan, Noah J. and Bastian, Amy J.}, title = {Patients with cerebellar ataxia do not benefit from limb weights}, journal = {Cerebellum}, volume = 18, number = 1, year = 2018, doi = {10.1007/s12311-018-0962-1}, url = {https://doi.org/10.1007/s12311-018-0962-1} } - E. D. Tytell, J. A. Carr, N. Danos, C. Wagenbach, C. M. Sullivan, T. Kiemel, N. J. Cowan, and M. M. Ankarali, “Body stiffness and damping depend sensitively on the timing of muscle activation in lampreys,” Integr Comp Biol, 2018.
[Bibtex]@article{tytellbody2018, author = {Tytell, Eric D. and Carr, Jennifer A. and Danos, Nicole and Wagenbach, Christopher and Sullivan, Caitlin M. and Kiemel, Tim and Cowan, Noah J. and Ankarali, M. M.}, title = {Body stiffness and damping depend sensitively on the timing of muscle activation in lampreys}, journal = {Integr Comp Biol}, year = 2018, doi = {10.1093/icb/icy042}, url = {https://doi.org/10.1093/icb/icy042} } - M. S. Madhav, R. P. Jayakumar, A. Demir, S. A. Stamper, E. S. Fortune, and N. J. Cowan, “High-resolution behavioral mapping of electric fishes in Amazonian habitats,” Sci Rep, vol. 8, iss. 1, p. 5830, 2018.
[Bibtex]@article{madhavhigh-resolution2018, author = {Madhav, Manu S. and Jayakumar, Ravikrishnan P. and Demir, Alican and Stamper, Sarah A. and Fortune, Eric S. and Cowan, Noah J.}, title = {High-resolution behavioral mapping of electric fishes in Amazonian habitats}, journal = {Sci Rep}, number = 1, volume = 8, year = 2018, pages = {5830}, doi = {10.1038/s41598-018-24035-5}, url = {https://doi.org/10.1038/s41598-018-24035-5} } - E. E. Sutton, A. Demir, S. A. Stamper, E. S. Fortune, and N. J. Cowan, “Dynamic modulation of visual and electrosensory gains for locomotor control,” J R Soc Interface, vol. 13, iss. 118, p. 20160057, 2016.
[Bibtex]@article{suttondynamic2016, author = {Sutton, Erin E. and Demir, Alican and Stamper, Sarah A. and Fortune, Eric S. and Cowan, Noah J.}, title = {Dynamic modulation of visual and electrosensory gains for locomotor control}, journal = {J R Soc Interface}, month = may, volume = 13, number = 118, year = 2016, pages = 20160057, doi = {10.1098/rsif.2016.0057}, url = {https://doi.org/10.1098/rsif.2016.0057}, note = {PMC4892261} } - I. Uyanik, M. M. Ankarali, N. J. Cowan, U. Saranli, and O. Morgul, “Identification of a vertical hopping robot model via harmonic transfer functions,” Trans Inst Measurement Control, vol. 38, iss. 5, p. 501–511, 2016.
[Bibtex]@article{uyanikidentification2016, author = {Uyanik, Ismail and Ankarali, Mustafa M. and Cowan, Noah J. and Saranli, Uluc and Morgul, Omer}, title = {Identification of a vertical hopping robot model via harmonic transfer functions}, journal = {Trans Inst Measurement Control}, year = 2016, volume = 38, number = 5, pages = {501--511}, doi = {10.1177/0142331215583327}, url = {https://doi.org/10.1177/0142331215583327} } - A. Lamperski and N. J. Cowan, “Optimal control with noisy time,” IEEE Trans Autom Control, vol. 61, iss. 2, p. 319–333, 2016.
[Bibtex]@article{lamperskioptimal2016, author = {Lamperski, Andrew and Cowan, Noah J.}, title = {Optimal control with noisy time}, journal = {IEEE Trans Autom Control}, volume = 61, number = 2, pages = {319--333}, year = 2016, month = feb, doi = {10.1109/TAC.2015.2444234}, url = {https://doi.org/10.1109/TAC.2015.2444234} } - M. M. Ankarali, S. Sefati, M. S. Madhav, A. Long, A. Bastian, and N. J. Cowan, “Walking dynamics are symmetric (enough),” J R Soc Interface, vol. 12, iss. 108, p. 20150209, 2015.
[Bibtex]@article{ankaraliwalking2015, author = {Ankarali, M. M. and Sefati, Shahin and Madhav, Manu S. and Long, Andrew and Bastian, Amy and Cowan, Noah J.}, title = {Walking dynamics are symmetric (enough)}, volume = 12, number = 108, journal = {J R Soc Interface}, year = 2015, pages = 20150209, doi = {10.1098/rsif.2015.0209}, url = {https://doi.org/10.1098/rsif.2015.0209} } - J. P. Swensen, M. Lin, A. M. Okamura, and N. J. Cowan, “Torsional dynamics of steerable needles: modeling and fluoroscopic guidance,” IEEE Trans Biomed Eng, vol. 66, iss. 11, p. 2707–2717, 2014.
[Bibtex]@article{swensentorsional2014, author = {Swensen, John P. and Lin, MingDe and Okamura, Allison M. and Cowan, Noah J.}, journal = {IEEE Trans Biomed Eng}, title = {Torsional dynamics of steerable needles: modeling and fluoroscopic guidance}, year = 2014, month = nov, volume = 66, number = 11, pages = {2707--2717}, doi = {10.1109/TBME.2014.2326161}, url = {https://doi.org/10.1109/TBME.2014.2326161} } - J. Mongeau, A. Demir, C. J. Dallmann, K. Jayaram, N. J. Cowan, and R. J. Full, “Mechanical processing via passive dynamic properties of the cockroach antenna can facilitate control during rapid running,” J Exp Biol, vol. 217, iss. 18, p. 3333–3345, 2014.
[Bibtex]@article{mongeaumechanical2014, title = {Mechanical processing via passive dynamic properties of the cockroach antenna can facilitate control during rapid running}, journal = {J Exp Biol}, author = {Mongeau, Jean-Michel and Demir, Alican and Dallmann, Chris J. and Jayaram, Kaushik and Cowan, Noah J. and Full, Robert J.}, year = 2014, volume = 217, number = 18, pages = {3333--3345}, doi = {10.1242/jeb.101501}, url = {https://doi.org/10.1242/jeb.101501}, } - M. M. Ankarali, H. T. Sen, A. De, A. M. Okamura, and N. J. Cowan, “Haptic feedback enhances rhythmic motor control by reducing variability, not improving convergence rate,” J Neurophysiol, vol. 111, iss. 6, p. 1286–1299, 2014.
[Bibtex]@article{ankaralihaptic2014, title = {Haptic feedback enhances rhythmic motor control by reducing variability, not improving convergence rate}, journal = {J Neurophysiol}, author = {Ankarali, M. M. and Sen, H. T. and De, Avik and Okamura, Allison M. and Cowan, Noah J.}, year = 2014, pages = {1286--1299}, number = 6, doi = {10.1152/jn.00140.2013}, volume = 111, url = {https://doi.org/10.1152/jn.00140.2013} } - J. Mongeau, A. Demir, J. Lee, N. J. Cowan, and R. J. Full, “Locomotion- and mechanics-mediated tactile sensing: antenna reconfiguration simplifies control during high-speed navigation in cockroaches,” J Exp Biol, vol. 216, iss. 24, p. 4530–4541, 2013.
[Bibtex]@article{mongeaulocomotion2013, author = {Mongeau, Jean-Michel and Demir, Alican and Lee, Jusuk and Cowan, Noah J. and Full, Robert J.}, title = {Locomotion- and mechanics-mediated tactile sensing: antenna reconfiguration simplifies control during high-speed navigation in cockroaches}, journal = {J Exp Biol}, volume = 216, number = 24, pages = {4530--4541}, year = 2013, doi = {10.1242/jeb.083477}, url = {https://doi.org/10.1242/jeb.083477} } - A. Rosenberg, N. J. Cowan, and D. E. Angelaki, “The visual representation of 3D object orientation in parietal cortex,” J Neurosci, vol. 33, iss. 49, p. 19352–19361, 2013.
[Bibtex]@Article{rosenbergvisual2013, author = {Rosenberg, Ari and Cowan, Noah J. and Angelaki, Dora E.}, title = {The visual representation of 3{D} object orientation in parietal cortex}, journal = {J Neurosci}, year = 2013, volume = 33, number = 49, pages = {19352--19361}, url = {https://doi.org/10.1523/JNEUROSCI.3174-13.2013}, doi = {10.1523/JNEUROSCI.3174-13.2013}, note = {PMC3850047} } - S. Sefati, I. D. Neveln, E. Roth, T. Mitchell, J. B. Snyder, M. A. MacIver, E. S. Fortune, and N. J. Cowan, “Mutually opposing forces during locomotion can eliminate the tradeoff between maneuverability and stability,” Proc Nat Acad Sci, vol. 110, iss. 47, p. 18798–18803, 2013.
[Bibtex]@Article{sefatimutually2013, author = {Sefati, Shahin and Neveln, Izaak D. and Roth, Eatai and Mitchell, Terence and Snyder, James B. and MacIver, Malcolm A. and Fortune, Eric S. and Cowan, Noah J.}, title = {Mutually opposing forces during locomotion can eliminate the tradeoff between maneuverability and stability}, journal = {Proc Nat Acad Sci}, year = 2013, volume = 110, number = 47, pages = {18798--18803}, url = {https://doi.org/10.1073/pnas.1309300110}, doi = {10.1073/pnas.1309300110}, note = {PMC3839770} } - M. S. Madhav, S. A. Stamper, E. S. Fortune, and N. J. Cowan, “Closed-loop stabilization of the jamming avoidance response reveals its locally unstable and globally nonlinear dynamics,” J Exp Biol, vol. 216, iss. 22, p. 4272–4284, 2013.
[Bibtex]@article{madhavclosed-loop2013, title = {Closed-loop stabilization of the jamming avoidance response reveals its locally unstable and globally nonlinear dynamics}, journal = {J Exp Biol}, author = {Madhav, Manu S. and Stamper, Sarah A. and Fortune, Eric S. and Cowan, Noah J.}, year = 2013, doi = {10.1242/jeb.088922}, url = {https://doi.org/10.1242/jeb.088922}, volume = 216, number = 22, pages = {4272--4284} } - J. P. Dyhr, T. L. Daniel, K. A. Morgansen, and N. J. Cowan, “Flexible strategies for flight control: an active role for the abdomen,” J Exp Biol, vol. 216, iss. 9, p. 1523–1536, 2013.
[Bibtex]@article{dyhrflexible2013, title = {Flexible strategies for flight control: an active role for the abdomen}, journal = {J Exp Biol}, pages = {1523--1536}, volume = 216, number = 9, author = {Dyhr, Jonathan P. and Daniel, Tom L. and Morgansen, Kristi A. and Cowan, Noah J.}, year = 2013, doi = {10.1242/jeb.077644}, url = {https://doi.org/10.1242/jeb.077644} } - N. J. Cowan, E. J. Chastain, D. A. Vilhena, J. S. Freudenberg, and C. T. Bergstrom, “Nodal dynamics, not degree distributions, determine the structural controllability of complex networks,” PLoS ONE, vol. 7, iss. 6, p. e38398, 2012.
[Bibtex]@ARTICLE{cowannodal2012, author = {Cowan, Noah J. and Chastain, Erick J. and Vilhena, Daril A. and Freudenberg, James S. and Bergstrom, Carl T.}, title = {Nodal dynamics, not degree distributions, determine the structural controllability of complex networks}, journal = {PLoS ONE}, year = 2012, volume = 7, pages = {e38398}, number = 6, url = {https://doi.org/10.1371/journal.pone.0038398}, doi = {10.1371/journal.pone.0038398}, note = {PMC3382243} } - S. A. Stamper, M. S. Madhav, N. J. Cowan, and E. S. Fortune, “Beyond the jamming avoidance response: weakly electric fish respond to the envelope of social electrosensory signals,” J Exp Biol, vol. 215, iss. 23, p. 4196–4207, 2012.
[Bibtex]@ARTICLE{stamperbeyond2012, author = {Stamper, Sarah A. and Madhav, Manu S. and Cowan, Noah J. and Fortune, Eric S.}, title = {Beyond the jamming avoidance response: weakly electric fish respond to the envelope of social electrosensory signals}, journal = {J Exp Biol}, year = 2012, volume = 215, pages = {4196--4207}, number = 23, doi = {10.1242/jeb.076513}, url = {https://doi.org/10.1242/jeb.076513}, annotation = {Stamper and Madhav contributed equally} } - S. A. Stamper, E. Roth, N. J. Cowan, and E. S. Fortune, “Active sensing via movement shapes spatiotemporal patterns of sensory feedback,” J Exp Biol, vol. 215, iss. 9, p. 1567–1574, 2012.
[Bibtex]@ARTICLE{stamperactive2012, author = {Stamper, Sarah A. and Roth, Eatai and Cowan, Noah J. and Fortune, Eric S.}, title = {Active sensing via movement shapes spatiotemporal patterns of sensory feedback}, journal = {J Exp Biol}, year = 2012, volume = 215, pages = {1567--1574}, number = 9, doi = {10.1242/jeb.068007}, url = {https://doi.org/10.1242/jeb.068007} } - K. B. Reed, A. Majewicz, V. Kallem, R. Alterovitz, K. Goldberg, N. J. Cowan, and A. M. Okamura, “Robot-assisted needle steering,” IEEE Robot Autom Mag, vol. 18, iss. 4, p. 35–46, 2011.
[Bibtex]@ARTICLE{reedrobot2011, author = {Reed, Kyle B. and Majewicz, Ann and Kallem, Vinutha and Alterovitz, Ron and Goldberg, Ken and Cowan, Noah J. and Okamura, Allison M.}, title = {Robot-assisted needle steering}, journal = {IEEE Robot Autom Mag}, year = 2011, volume = 18, pages = {35--46}, number = 4, doi = {10.1109/MRA.2011.942997}, url = {https://doi.org/10.1109/MRA.2011.942997}, note = {PMC3460644} } - E. Roth, K. Zhuang, S. A. Stamper, E. S. Fortune, and N. J. Cowan, “Stimulus predictability mediates a switch in locomotor smooth pursuit performance for Eigenmannia virescens,” J Exp Biol, vol. 214, iss. 7, p. 1170–1180, 2011.
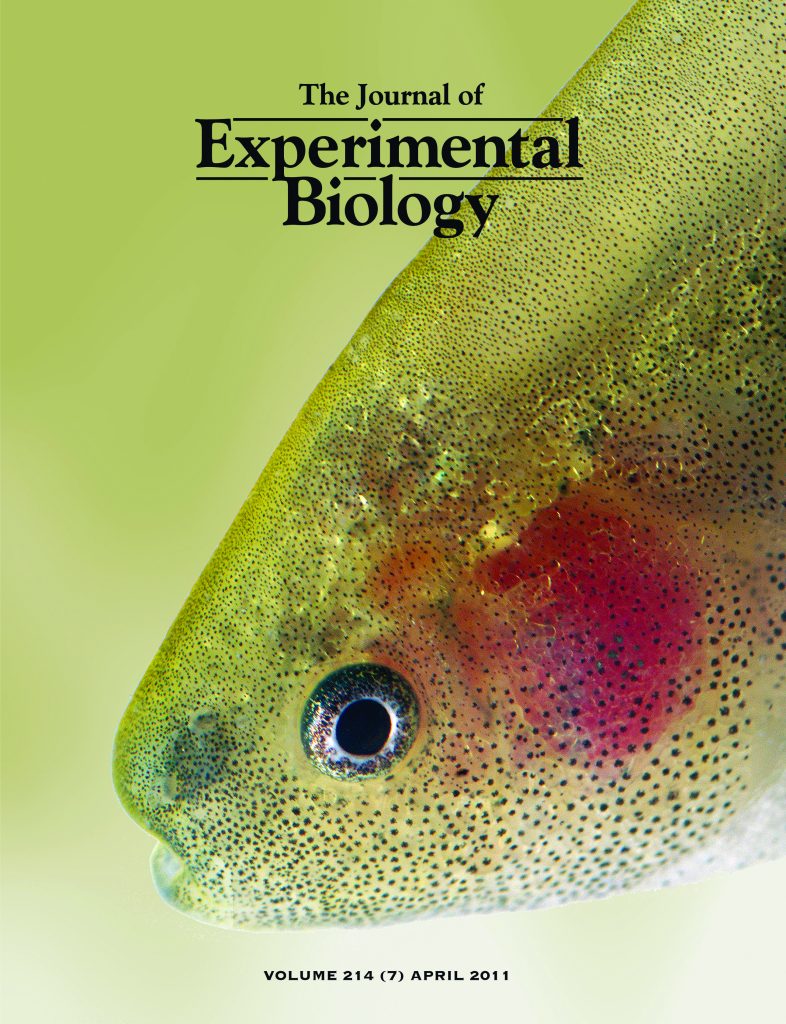
[Bibtex]@ARTICLE{rothstimulus2011, author = {Roth, Eatai and Zhuang, Katie and Stamper, Sarah A. and Fortune, Eric S. and Cowan, Noah J.}, title = {Stimulus predictability mediates a switch in locomotor smooth pursuit performance for {E}igenmannia virescens}, journal = {J Exp Biol}, year = 2011, volume = 214, pages = {1170--1180}, number = 7, doi = {10.1242/jeb.048124}, url = {https://doi.org/10.1242/jeb.048124}, pmid = 21389203 } - V. Kallem, D. E. Chang, and N. J. Cowan, “Task-induced symmetry and reduction with application to needle steering,” IEEE Trans Autom Control, vol. 55, iss. 3, p. 664–673, 2010.
[Bibtex]@ARTICLE{kallemtask-induced2010, author = {Kallem, Vinutha and Chang, Dong E. and Cowan, Noah J.}, title = {Task-induced symmetry and reduction with application to needle steering}, journal = {IEEE Trans Autom Control}, year = 2010, volume = 55, pages = {664--673}, number = 3, month = mar, note = {PMC2871331}, doi = {10.1109/TAC.2009.2039241}, url = {https://doi.org/10.1109/TAC.2009.2039241} } - D. C. Rucker, R. J. {Webster III}, G. S. Chirikjian, and N. J. Cowan, “Equilibrium conformations of concentric-tube continuum robots,” Int J Robot Res, vol. 29, p. 1263–1280, 2010.
[Bibtex]@ARTICLE{ruckerequilibrium2010, author = {Rucker, D. C. and {Webster III}, Robert J. and Chirikjian, Gregory S. and Cowan, Noah J.}, title = {Equilibrium conformations of concentric-tube continuum robots}, journal = {Int J Robot Res}, year = 2010, volume = 29, pages = {1263--1280}, doi = {10.1177/0278364910367543}, url = {https://doi.org/10.1177/0278364910367543} } - S. G. Carver, N. J. Cowan, and J. M. Guckenheimer, “Lateral stability of the spring-mass hopper suggests a two step control strategy for running,” Chaos, vol. 19, iss. 2, 2009.
[Bibtex]@ARTICLE{carverlateral2009, author = {Carver, Sean G. and Cowan, Noah J. and Guckenheimer, John M.}, title = {Lateral stability of the spring-mass hopper suggests a two step control strategy for running}, journal = {Chaos}, year = 2009, volume = 19, number = 2, doi = {10.1063/1.3127577}, url = {https://doi.org/10.1063/1.3127577} } - S. G. Carver, T. Kiemel, N. J. Cowan, and J. J. Jeka, “Optimal motor control may mask sensory dynamics,” Biol Cybern, vol. 101, iss. 1, p. 35–42, 2009.
[Bibtex]@ARTICLE{carveroptimal2009, author = {Carver, Sean G. and Kiemel, Timothy and Cowan, Noah J. and Jeka, John J.}, title = {Optimal motor control may mask sensory dynamics}, journal = {Biol Cybern}, year = 2009, volume = 101, pages = {35--42}, number = 1, doi = {10.1007/s00422-009-0313-x}, url = {https://doi.org/10.1007/s00422-009-0313-x}, note = {PMC2778031} } - V. Kallem and N. J. Cowan, “Image guidance of flexible tip-steerable needles,” IEEE Trans Robot, vol. 25, iss. 1, p. 191–196, 2009.
[Bibtex]@ARTICLE{kallemimage2009, author = {Kallem, Vinutha and Cowan, Noah J.}, title = {Image guidance of flexible tip-steerable needles}, journal = {IEEE Trans Robot}, year = 2009, volume = 25, pages = {191--196}, note = {PMC2860577}, number = 1, doi = {10.1109/TRO.2008.2010357}, url = {https://doi.org/10.1109/TRO.2008.2010357} } - K. B. Reed, A. M. Okamura, and N. J. Cowan, “Modeling and control of needles with torsional friction,” IEEE Trans Biomed Eng, vol. 56, iss. 12, p. 2905–2916, 2009.
[Bibtex]@ARTICLE{reedmodeling2009, author = {Reed, Kyle B. and Okamura, Allison M. and Cowan, Noah J.}, title = {Modeling and control of needles with torsional friction}, journal = {IEEE Trans Biomed Eng}, year = 2009, volume = 56, pages = {2905--2916}, number = 12, month = dec, note = {PMC2859043}, doi = {10.1109/TBME.2009.2029240}, url = {https://doi.org/10.1109/TBME.2009.2029240} } - R. J. {Webster III}, J. M. Romano, and N. J. Cowan, “Mechanics of precurved-tube continuum robots,” IEEE Trans Robot, vol. 25, iss. 1, p. 67–78, 2009.
[Bibtex]@ARTICLE{webstermechanics2009, author = {{Webster III}, Robert J. and Romano, Joseph M. and Cowan, Noah J.}, title = {Mechanics of precurved-tube continuum robots}, journal = {IEEE Trans Robot}, year = 2009, volume = 25, pages = {67--78}, number = 1, doi = {10.1109/TRO.2008.2006868}, url = {https://doi.org/10.1109/TRO.2008.2006868} } - S. G. Carver, E. Roth, N. J. Cowan, and E. S. Fortune, “Synaptic plasticity can produce and enhance direction selectivity,” PLoS Comp Biol, vol. 4, iss. 2, 2008.
[Bibtex]@ARTICLE{carversynaptic2008, author = {Carver, Sean G. and Roth, Eatai and Cowan, Noah J. and Fortune, Eric S.}, title = {Synaptic plasticity can produce and enhance direction selectivity}, journal = {PLoS Comp Biol}, year = 2008, volume = 4, number = 2, note = {PMC2242823}, doi = {10.1371/journal.pcbi.0040032}, url = {https://doi.org/10.1371/journal.pcbi.0040032} } - J. Lee, S. N. Sponberg, O. Y. Loh, A. G. Lamperski, R. J. Full, and N. J. Cowan, “Templates and anchors for antenna-based wall following in cockroaches and robots,” IEEE Trans Robot, vol. 24, iss. 1, p. 130–143, 2008.
[Bibtex]@ARTICLE{leetemplates2008, author = {Lee, Jusuk and Sponberg, Simon N. and Loh, Owen Y. and Lamperski, Andrew G. and Full, Robert J. and Cowan, Noah J.}, title = {Templates and anchors for antenna-based wall following in cockroaches and robots}, journal = {IEEE Trans Robot}, year = 2008, volume = 24, pages = {130--143}, number = 1, doi = {10.1109/TRO.2007.913981}, url = {https://doi.org/10.1109/TRO.2007.913981} } - N. J. Cowan, “Navigation functions on cross product spaces,” IEEE Trans Autom Control, vol. 52, iss. 7, p. 1297–1302, 2007.
[Bibtex]@ARTICLE{cowannavigation2007, author = {Cowan, Noah J.}, title = {Navigation functions on cross product spaces}, journal = {IEEE Trans Autom Control}, year = 2007, volume = 52, pages = {1297--1302}, number = 7, doi = {10.1109/TAC.2007.900834}, url = {https://doi.org/10.1109/TAC.2007.900834} } - N. J. Cowan and E. S. Fortune, “The critical role of locomotion mechanics in decoding sensory systems,” J Neurosci, vol. 27, iss. 5, p. 1123–1128, 2007.
[Bibtex]@ARTICLE{cowancritical2007, author = {Cowan, Noah J. and Fortune, Eric S.}, title = {The critical role of locomotion mechanics in decoding sensory systems}, journal = {J Neurosci}, year = 2007, volume = 27, pages = {1123--1128}, number = 5, doi = {10.1523/JNEUROSCI.4198-06.2007}, url = {https://doi.org/10.1523/JNEUROSCI.4198-06.2007} } - N. J. Cowan, J. Lee, and R. J. Full, “Task-level control of rapid wall following in the American cockroach,” J Exp Biol, vol. 209, iss. 9, p. 1617–1629, 2006.
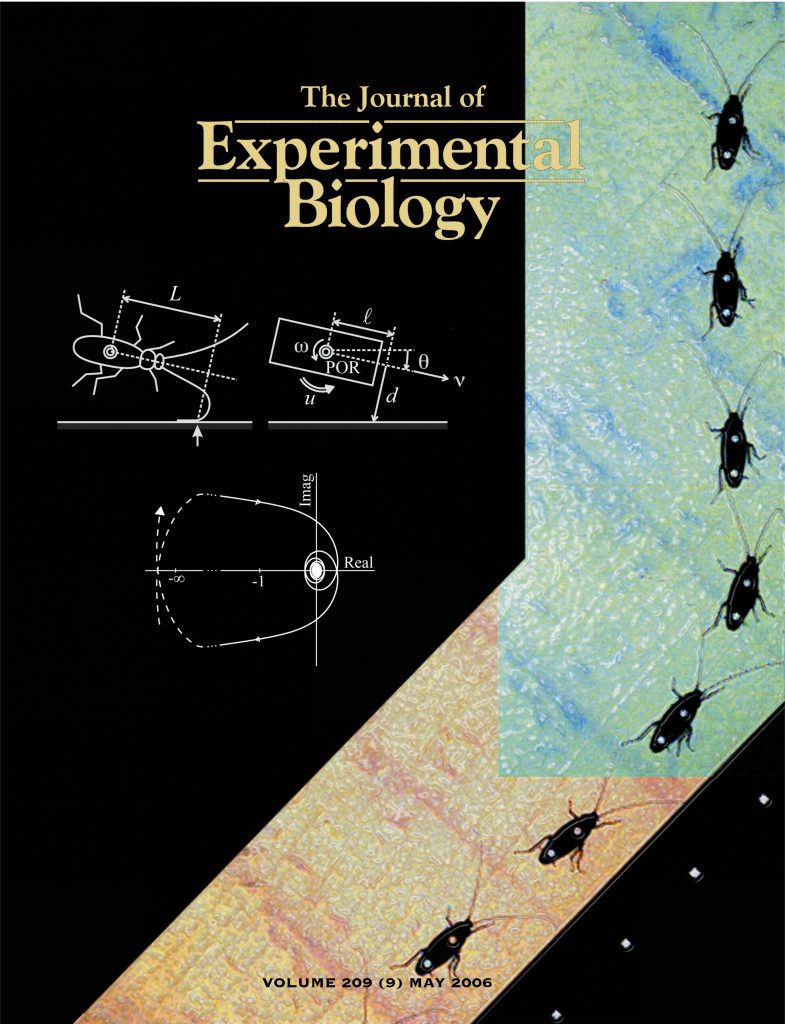
[Bibtex]@ARTICLE{cowantask-level2006, author = {Cowan, Noah J. and Lee, Jusuk and Full, Robert J.}, title = {Task-level control of rapid wall following in the {A}merican cockroach}, journal = {J Exp Biol}, year = 2006, volume = 209, pages = {1617--1629}, number = 9, doi = {10.1242/jeb.02166}, url = {https://doi.org/10.1242/jeb.02166} } - R. J. {Webster III}, J. S. Kim, N. J. Cowan, G. S. Chirikjian, and A. M. Okamura, “Nonholonomic modeling of needle steering,” Int J Robot Res, vol. 25, iss. 5/6, p. 509–526, 2006.
[Bibtex]@ARTICLE{websternonholonomic2006, author = {{Webster III}, Robert J. and Kim, Jin S. and Cowan, Noah J. and Chirikjian, Gregory S. and Okamura, Allison M.}, title = {Nonholonomic modeling of needle steering}, journal = {Int J Robot Res}, year = 2006, volume = 25, pages = {509--526}, number = {5/6}, month = May, doi = {10.1177/0278364906065388}, url = {https://doi.org/10.1177/0278364906065388} } - N. J. Cowan and D. E. Chang, “Geometric visual servoing,” IEEE Trans Robot, vol. 21, iss. 6, p. 1128–1138, 2005.
[Bibtex]@ARTICLE{cowangeometric2005, author = {Cowan, Noah J. and Chang, Dong E.}, title = {Geometric visual servoing}, journal = {IEEE Trans Robot}, year = 2005, volume = 21, pages = {1128--1138}, number = 6, month = Dec, doi = {10.1109/TRO.2005.853491}, url = {https://doi.org/10.1109/TRO.2005.853491} } - N. J. Cowan, J. D. Weingarten, and D. E. Koditschek, “Visual servoing via navigation functions,” IEEE Trans Robot Automat, vol. 18, iss. 4, p. 521–533, 2002.
[Bibtex]@ARTICLE{cowanvisual2002, author = {Cowan, Noah J. and Weingarten, Joel D. and Koditschek, Daniel E.}, title = {Visual servoing via navigation functions}, journal = {IEEE Trans Robot Automat}, year = 2002, volume = 18, pages = {521--533}, number = 4, doi = {10.1109/TRA.2002.802202}, url = {https://doi.org/10.1109/TRA.2002.802202} }
[ Reviews | Preprints | Journal Articles | Conference Papers | Chapters | Theses | Abstracts | LIMBS Dataverse]
Conference Papers
- D. Biswas, E. D. Sontag, and N. J. Cowan, “An exact active sensing strategy for a class of bio-inspired systems,” in Proc Euro Control Conf, 2025.
[Bibtex]@inproceedings{biswasexact2025a, author = {Biswas, Debojyoti and Sontag, Eduardo D. and Cowan, Noah J.}, booktitle = {Proc Euro Control Conf}, title = {An exact active sensing strategy for a class of bio-inspired systems}, year = 2025, note = {Selecting from among ``...the very best papers that are submitted to the ECC'' to appear in a special issue of the European Journal of Control} } - S. Deng, J. Liu, B. Datta, A. Pantula, D. H. Gracias, T. D. Nguyen, B. A. Bittner, and N. J. Cowan, “A Data-Driven Approach to Geometric Modeling of Systems with Low-Bandwidth Actuator Dynamics,” in Proc IEEE Int Conf Robot Autom, 2024, pp. 14988-14994.
[Bibtex]@inproceedings{dengdatadriven2024, author = {Deng, Siming and Liu, Junning and Datta, Bibekananda and Pantula, Aishwarya and Gracias, David H. and Nguyen, Thao D. and Bittner, Brian A. and Cowan, Noah J.}, booktitle = {Proc IEEE Int Conf Robot Autom}, title = {A Data-Driven Approach to Geometric Modeling of Systems with Low-Bandwidth Actuator Dynamics}, pages = {14988-14994}, doi = {10.1109/ICRA57147.2024.10610880}, year = 2024 } - S. Deng, N. J. Cowan, and B. A. Bittner, “Adaptive Gait Modeling and Optimization for Principally Kinematic Systems,” in Proc IEEE Int Conf Robot Autom, 2024, pp. 12571-12577.
[Bibtex]@inproceedings{dengadaptive2024, author = {Deng, Siming and Cowan, Noah J. and Bittner, Brian A.}, booktitle = {Proc IEEE Int Conf Robot Autom}, title = {Adaptive Gait Modeling and Optimization for Principally Kinematic Systems}, pages = {12571-12577}, doi = {10.1109/ICRA57147.2024.10611303}, year = 2024 } - S. Deng, R. L. Hatton, and N. J. Cowan, “Enhancing Maneuverability via Gait Design,” in Proc IEEE Int Conf Robot Autom, 2022, pp. 5799-5805.
[Bibtex]@inproceedings{dengenhancing2022, author = {Deng, Siming and Hatton, Ross L. and Cowan, Noah J.}, booktitle = {Proc IEEE Int Conf Robot Autom}, title = {Enhancing Maneuverability via Gait Design}, pages = {5799-5805}, year = 2022 } - S. Cutlip, J. Freudenberg, N. Cowan, and B. R. Gillespie, “Haptic Feedback and the Internal Model Principle,” in IEEE World Haptics Conf, 2019, pp. 568-573.
[Bibtex]@inproceedings{cutliphaptic2019, author = {Cutlip, Steven and Freudenberg, Jim and Cowan, Noah and Gillespie, R Brent}, booktitle = {IEEE World Haptics Conf}, title = {Haptic Feedback and the Internal Model Principle}, pages = {568-573}, year = 2019 } - D. Ehrens, F. Assaf, N. J. Cowan, S. V. Sarma, and Y. Schiller, “Ultra Broad Band Neural Activity Portends Seizure Onset in a Rat Model of Epilepsy,” in Conf Proc IEEE Eng Med Biol Soc, 2018.
[Bibtex]@inproceedings{ehrensultra2018, author = {Ehrens, Daniel and Assaf, Fadi and Cowan, Noah J. and Sarma, Sridevi V. and Schiller, Yitzhak}, booktitle = {Conf Proc IEEE Eng Med Biol Soc}, month = jul, publisher = {IEEE}, title = {Ultra Broad Band Neural Activity Portends Seizure Onset in a Rat Model of Epilepsy}, year = 2018 } - A. Kunapareddy and N. J. Cowan, “Recovering observability via active sensing,” in Proc Amer Control Conf, Milwaukee, WI, USA, 2018, p. 2821–2826.
[Bibtex]@inproceedings{kunapareddyrecovering2018, author = {Kunapareddy, Abhinav and Cowan, Noah J.}, title = {Recovering observability via active sensing}, booktitle = {Proc Amer Control Conf}, year = 2018, address = {Milwaukee, WI, USA}, pages = {2821--2826} } - B. Fuerst, E. E. Sutton, R. Ghotbi, N. J. Cowan, and N. Navab, “Bioelectric navigation: a new paradigm for intravascular device guidance,” in Proc Med Image Computing and Computer-Assisted Intervention, 2016.
[Bibtex]@inproceedings{fuerstbioelectric2016, author = {Fuerst, B. and Sutton, E. E. and Ghotbi, R. and Cowan, N. J. and Navab, N.}, booktitle = {Proc Med Image Computing and Computer-Assisted Intervention}, Editor = {S{\'e}bastien Ourselin and William Wells and Mert R. Sabuncu and G{\"o}zde Unal and Leo Joskowicz}, Publisher = {Springer}, Series = {LNCS}, Title = {Bioelectric navigation: a new paradigm for intravascular device guidance}, Volume = 9902, Year = 2016 } - I. Uyanik, M. M. Ankarali, N. J. Cowan, O. Morgul, and U. Saranli, “Toward data-driven models of legged locomotion using harmonic transfer functions,” in Int Conf Advanced Robotics, Istanbul, Turkey, 2015, p. 357–362.
[Bibtex]@inproceedings{uyaniktoward2015, author = {Uyanik, Ismail and Ankarali, M. M. and Cowan, Noah J. and Morgul, Omer and Saranli, Uluc}, title = {Toward data-driven models of legged locomotion using harmonic transfer functions}, booktitle = {Int Conf Advanced Robotics}, pages = {357--362}, year = 2015, organization = {IEEE}, address = {Istanbul, Turkey} } - I. Uyanik, M. M. Ankarali, N. J. Cowan, U. Saranli, O. Morgul, and H. Ozbay, “Independent estimation of input and measurement delays for a hybrid vertical spring-mass-damper via harmonic transfer functions,” in IFAC Workshop on Time Delay Systems, Ann Arbor, MI, USA, 2015.
[Bibtex]@inproceedings{uyanikindependent2015, author = {Uyanik, Ismail and Ankarali, M. M. and Cowan, Noah J. and Saranli, Uluc and Morgul, Omer and Ozbay, Hitay}, title = {Independent estimation of input and measurement delays for a hybrid vertical spring-mass-damper via harmonic transfer functions}, booktitle = {IFAC Workshop on Time Delay Systems}, year = 2015, address = {Ann Arbor, MI, USA} } - S. Sefati, N. J. Cowan, and R. Vidal, “Linear systems with sparse inputs: observability and input recovery,” in Proc Amer Control Conf, Chicago, IL, USA, 2015, p. 5251–5257.
[Bibtex]@inproceedings{sefatilinear2015, author = {Sefati, Shahin and Cowan, Noah J. and Vidal, Ren\'e}, title = {Linear systems with sparse inputs: observability and input recovery}, booktitle = {Proc Amer Control Conf}, pages = {5251--5257}, year = 2015, organization = {IEEE}, address = {Chicago, IL, USA} } - S. Sefati, N. J. Cowan, and R. Vidal, “Learning shared, discriminative dictionaries for surgical gesture segmentation and classification,” in Proc Med Image Computing and Computer-Assisted Intervention, Munich, Germany, 2015.
[Bibtex]@inproceedings{sefatilearning2015, author = {Sefati, Shahin and Cowan, Noah J. and Vidal, Ren\'e}, title = {Learning shared, discriminative dictionaries for surgical gesture segmentation and classification}, booktitle = {Proc Med Image Computing and Computer-Assisted Intervention}, year = 2015, address = {Munich, Germany} } - M. M. Ankarali and N. J. Cowan, “System identification of rhythmic hybrid dynamical systems via discrete time harmonic transfer functions,” in Proc IEEE Conf Decis Control, Los Angeles, CA, USA, 2014.
[Bibtex]@inproceedings{ankaralisystem2014, author = {Ankarali, M. M. and Cowan, Noah J.}, title = {System identification of rhythmic hybrid dynamical systems via discrete time harmonic transfer functions}, booktitle = {Proc IEEE Conf Decis Control}, year = 2014, address = {Los Angeles, CA, USA} } - A. Lamperski and N. J. Cowan, “Time-changed linear quadratic regulators,” in Proc Euro Control Conf, Zurich, Switzerland, 2013.
[Bibtex]@inproceedings{lamperskitime2013, author = {Lamperski, Andrew and Cowan, Noah J.}, title = {Time-changed linear quadratic regulators}, booktitle = {Proc Euro Control Conf}, year = 2013, address = {Zurich, Switzerland}, month = jul } - S. G. Carver, E. S. Fortune, and N. J. Cowan, “State-estimation and cooperative control with uncertain time,” in Proc Amer Control Conf, Washington, DC, USA, 2013, p. 2990–2995.
[Bibtex]@inproceedings{carverstate2013, author = {Carver, Sean G. and Fortune, Eric S. and Cowan, Noah J.}, title = {State-estimation and cooperative control with uncertain time}, booktitle = {Proc Amer Control Conf}, year = 2013, pages = {2990--2995}, address = {Washington, DC, USA}, month = jun, publisher = {IEEE} } - J. P. Swensen and N. J. Cowan, “Torsional dynamics compensation enhances robotic control of tip-steerable needles,” in Proc IEEE Int Conf Robot Autom, 2012.
[Bibtex]@inproceedings{swensentorsional2012, author = {Swensen, John P. and Cowan, Noah J.}, title = {Torsional dynamics compensation enhances robotic control of tip-steerable needles}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2012, month = may } - J. P. Swensen and N. J. Cowan, “An almost global estimator on SO(3) with measurement on $S^2$,” in Proc Amer Control Conf, 2012.
[Bibtex]@inproceedings{swensenalmost2012, author = {Swensen, John P. and Cowan, Noah J.}, title = {An almost global estimator on {SO}(3) with measurement on {$S^2$}}, booktitle = {Proc Amer Control Conf}, year = 2012, month = jun } - S. Sefati, I. Neveln, M. A. MacIver, E. S. Fortune, and N. J. Cowan, “Counter-propagating waves enhance maneuverability and stability: a bio-inspired strategy for robotic ribbon-fin propulsion,” in Proc IEEE Int Conf on Biomed Robot and Biomech, Rome, Italy, 2012.
[Bibtex]@inproceedings{sefaticounter2012, author = {Sefati, Shahin and Neveln, Izaak and MacIver, Malcolm A. and Fortune, Eric S. and Cowan, Noah J.}, title = {Counter-propagating waves enhance maneuverability and stability: a bio-inspired strategy for robotic ribbon-fin propulsion}, booktitle = {Proc IEEE Int Conf on Biomed Robot and Biomech}, year = 2012, address = {Rome, Italy} } - E. Roth, M. B. Reiser, M. H. Dickinson, and N. J. Cowan, “A task-level model for optomotor yaw regulation in Drosophila melanogaster: a frequency-domain system identification approach,” in Proc IEEE Conf Decis Control, 2012.
[Bibtex]@inproceedings{rothtask2012, author = {Roth, Eatai and Reiser, Michael B. and Dickinson, Michael H. and Cowan, Noah J.}, title = {A task-level model for optomotor yaw regulation in {D}rosophila melanogaster: a frequency-domain system identification approach}, booktitle = {Proc IEEE Conf Decis Control}, year = 2012 } - J. P. Dyhr, N. J. Cowan, D. J. Colmenares, K. A. Morgansen, and T. L. Daniel, “Autostabilizing airframe articulation: Animal inspired air vehicle control,” in Proc IEEE Conf Decis Control, 2012.
[Bibtex]@inproceedings{dyhrautostabilizing2012, author = {Dyhr, Jonathan P. and Cowan, Noah J. and Colmenares, David J. and Morgansen, Kristi A. and Daniel, Tom L.}, title = {Autostabilizing airframe articulation: Animal inspired air vehicle control}, booktitle = {Proc IEEE Conf Decis Control}, year = 2012 } - A. Demir, M. M. Ankarali, J. P. Dyhr, K. A. Morgansen, T. L. Daniel, and N. J. Cowan, “Inertial redirection of thrust forces for flight stabilization,” in Proc Conf on Climbing and Walking Robots, Baltimore, MD, USA, 2012.
[Bibtex]@inproceedings{demirinertial2012, author = {Demir, Alican and Ankarali, M. M. and Dyhr, Jonathan P. and Morgansen, Kristi A. and Daniel, Tom L. and Cowan, Noah J.}, title = {Inertial redirection of thrust forces for flight stabilization}, booktitle = {Proc Conf on Climbing and Walking Robots}, year = 2012, address = {Baltimore, MD, USA} } - V. Kallem, D. E. Chang, and N. J. Cowan, “Observer design for needle steering using task-induced symmetry and reduction,” in World Cong Intl Fed Autom Control, Milan, Italy, 2011.
[Bibtex]@inproceedings{kallemobserver2011, author = {Kallem, Vinutha and Chang, Dong E. and Cowan, Noah J.}, title = {Observer design for needle steering using task-induced symmetry and reduction}, booktitle = {World Cong Intl Fed Autom Control}, year = 2011, address = {Milan, Italy}, month = aug } - A. De, J. Lee, N. Keller, and N. J. Cowan, “Toward SLAM on graphs,” in Workshop on the Algorithmic Foundations of Robotics, Berlin, 2010, p. 631–646.
[Bibtex]@inproceedings{detoward2010, author = {De, Avik and Lee, Jusuk and Keller, Nicholas and Cowan, Noah J.}, title = {Toward {SLAM} on graphs}, booktitle = {Workshop on the Algorithmic Foundations of Robotics}, publisher = {Springer-Verlag}, year = 2010, editor = {Gregory S. Chirikjian and Howie Choset and Marco Morales and Todd Murphey}, series = {Springer Tracts in Advanced Robotics}, pages = {631--646}, address = {Berlin} } - A. Demir, E. W. Samson, and N. J. Cowan, “A tunable physical model of arthropod antennae,” in Proc IEEE Int Conf Robot Autom, Anchorage, AK, USA, 2010, pp. 3793-3798.
[Bibtex]@inproceedings{demirtunable2010, author = {Demir, Alican and Samson, Edward W. and Cowan, Noah J.}, title = {A tunable physical model of arthropod antennae}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2010, pages = {3793-3798}, address = {Anchorage, AK, USA}, month = may, doi = {10.1109/ROBOT.2010.5509323}, url = {https://doi.org/10.1109/ROBOT.2010.5509323} } - R. J. {Webster III}, J. P. Swensen, J. M. Romano, and N. J. Cowan, “Closed-form differential kinematics for concentric-tube continuum robots with application to visual servoing,” in Proc Int Symp Exp Robot, 2009, pp. 485-494.
[Bibtex]@inproceedings{websterclosed2009, author = {{Webster III}, Robert J. and Swensen, John P. and Romano, Joseph M. and Cowan, Noah J.}, title = {Closed-form differential kinematics for concentric-tube continuum robots with application to visual servoing}, booktitle = {Proc Int Symp Exp Robot}, year = 2009, volume = 54, pages = {485-494}, issue = 1 } - K. B. Reed, A. M. Okamura, and N. J. Cowan, “Controlling a robotically steered needle in the presence of torsional friction,” in Proc IEEE Int Conf Robot Autom, Kobe, Japan, 2009, pp. 3476-3481.
[Bibtex]@inproceedings{reedcontrolling2009, author = {Reed, Kyle B. and Okamura, Allison M. and Cowan, Noah J.}, title = {Controlling a robotically steered needle in the presence of torsional friction}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2009, pages = {3476-3481}, address = {Kobe, Japan}, month = apr, note = {PMC3040793} } - R. J. {Webster III}, J. M. Romano, and N. J. Cowan, “Kinematics and calibration of active cannulas,” in Proc IEEE Int Conf Robot Autom, 2008, pp. 3888-3895.
[Bibtex]@inproceedings{websterkinematics2008, author = {{Webster III}, Robert J. and Romano, Joseph. M and Cowan, Noah. J}, title = {Kinematics and calibration of active cannulas}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2008, pages = {3888-3895} } - K. B. Reed, V. Kallem, R. Alterovitz, K. Goldberg, A. M. Okamura, and N. J. Cowan, “Integrated planning and image-guided control for planar needle-steering,” in Proc IEEE Int Conf on Biomed Robot and Biomech, Scottsdale, AR, USA, 2008, pp. 819-824.
[Bibtex]@inproceedings{reedintegrated2008, author = {Reed, Kyle B. and Kallem, Vinutha and Alterovitz, Ron and Goldberg, Ken and Okamura, Allison M. and Cowan, Noah J.}, title = {Integrated planning and image-guided control for planar needle-steering}, booktitle = {Proc IEEE Int Conf on Biomed Robot and Biomech}, year = 2008, pages = {819-824}, address = {Scottsdale, AR, USA}, month = oct, note = {PMC2905598} } - J. Lee, O. Y. Loh, and N. J. Cowan, “A hierarchy of neuromechanical and robotic models of antenna-based wall following in cockroaches,” in Proc IEEE RSJ Int Conf Intell Robots Syst, San Diego, CA, USA, 2007, pp. 3547-3553.
[Bibtex]@inproceedings{leehierarchy2007, author = {Lee, Jusuk and Loh, Owen Y. and Cowan, Noah J.}, title = {A hierarchy of neuromechanical and robotic models of antenna-based wall following in cockroaches}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2007, pages = {3547-3553}, address = {San Diego, CA, USA}, month = oct } - V. Kallem, D. E. Chang, and N. J. Cowan, “Task-induced symmetry and reduction in kinematic systems with application to needle steering,” in Proc IEEE RSJ Int Conf Intell Robots Syst, San Diego, CA, USA, 2007, p. 3302–3308.
[Bibtex]@inproceedings{kallemtask2007, author = {Kallem, Vinutha and Chang, Dong E. and Cowan, Noah J.}, title = {Task-induced symmetry and reduction in kinematic systems with application to needle steering}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2007, pages = {3302--3308}, address = {San Diego, CA, USA}, month = oct, note = {PMC2907182} } - V. Kallem, M. Dewan, J. P. Swensen, G. D. Hager, and N. J. Cowan, “Kernel-based visual servoing,” in Proc IEEE RSJ Int Conf Intell Robots Syst, San Diego, CA, USA, 2007, p. 1975–1980.
[Bibtex]@inproceedings{kallemkernel2007, author = {Kallem, Vinutha and Dewan, Maneesh and Swensen, John P. and Hager, Gregory D. and Cowan, Noah J.}, title = {Kernel-based visual servoing}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2007, pages = {1975--1980}, address = {San Diego, CA, USA}, month = oct } - V. Kallem and N. J. Cowan, “Image-guided control of flexible bevel-tip needles,” in Proc IEEE Int Conf Robot Autom, Rome, Italy, 2007, p. 3015–3020.
[Bibtex]@inproceedings{kallemimage2007, author = {Kallem, Vinutha and Cowan, Noah J.}, title = {Image-guided control of flexible bevel-tip needles}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2007, pages = {3015--3020}, address = {Rome, Italy}, month = apr, note = {PMC3043465}, doi = {10.1109/ROBOT.2007.363930}, url = {https://doi.org/10.1109/ROBOT.2007.363930} } - R. J. {Webster III}, A. O. Okamura, and N. J. Cowan, “Toward active cannulas: miniature snake-like surgical robots,” in Proc IEEE RSJ Int Conf Intell Robots Syst, 2006, pp. 2857-2863.
[Bibtex]@inproceedings{webstertoward2006, author = {{Webster III}, Robert J. and Okamura, Allison. O and Cowan, Noah. J}, title = {Toward active cannulas: miniature snake-like surgical robots}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2006, pages = {2857-2863}, doi = {10.1109/IROS.2006.282073} } - R. J. {Webster III}, N. J. Cowan, G. S. Chirikjian, and A. M. Okamura, “Nonholonomic Models for Needle Steering,” in Proc Int Symp Exp Robot, Singapore, 2006, p. 35–44.
[Bibtex]@inproceedings{websternonholonomic2006a, author = {{Webster III}, Robert J. and Cowan, Noah J. and Chirikjian, Gregory S. and Okamura, Allison M.}, title = {Nonholonomic Models for Needle Steering}, booktitle = {Proc Int Symp Exp Robot}, year = 2006, editor = {Ang, Marcelo H. Jr and Khatib, Oussama}, volume = 21, series = {Tracts in Advanced Robotics}, pages = {35--44}, address = {Singapore}, month = jun } - W. Park, J. S. Kim, Y. Zhou, N. J. Cowan, A. M. Okamura, and G. S. Chirikjian, “Diffusion-based motion planning for a nonholonomic flexible needle model,” in Proc IEEE Int Conf Robot Autom, Barcelona, Spain, 2005, p. 4600–4605.
[Bibtex]@inproceedings{parkdiffusion2005, author = {Park, Wooram and Kim, Jin S. and Zhou, Yu and Cowan, Noah J. and Okamura, Allison M. and Chirikjian, Gregory S.}, title = {Diffusion-based motion planning for a nonholonomic flexible needle model}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2005, pages = {4600--4605}, address = {Barcelona, Spain}, month = apr, organization = {IEEE} } - A. Lamperski, O. Loh, B. Kutscher, and N. J. Cowan, “Dynamical wall-following for a wheeled robot using a passive tactile sensor,” in Proc IEEE Int Conf Robot Autom, 2005, pp. 3838-3843.
[Bibtex]@inproceedings{lamperskidynamical2005, author = {Lamperski, Andrew and Loh, Owen and Kutscher, Brett and Cowan, Noah J.}, title = {Dynamical wall-following for a wheeled robot using a passive tactile sensor}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2005, pages = {3838-3843} } - J. Piazzi and N. J. Cowan, “Multi-view visual servoing using epipoles,” in Proc IEEE RSJ Int Conf Intell Robots Syst, Sendai, Japan, 2004, pp. 674-679.
[Bibtex]@inproceedings{piazzimulti2004, author = {Piazzi, Jacopo and Cowan, Noah J.}, title = {Multi-view visual servoing using epipoles}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2004, volume = 1, pages = {674-679}, address = {Sendai, Japan}, month = oct, doi = {10.1109/IROS.2004.1389430} } - J. Piazzi, D. Prattichizzo, and N. J. Cowan, “Auto-epipolar visual servoing,” in Proc IEEE RSJ Int Conf Intell Robots Syst, Sendai. Japan, 2004, pp. 363-368.
[Bibtex]@inproceedings{piazziauto2004, author = {Piazzi, Jacopo and Prattichizzo, Domenico and Cowan, Noah J.}, title = {Auto-epipolar visual servoing}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2004, volume = 1, pages = {363-368}, address = {Sendai. Japan}, month = sep, doi = {10.1109/IROS.2004.1389379} } - N. J. Cowan, “Composing navigation functions on Cartesian products of manifolds with boundary,” in Workshop on the Algorithmic Foundations of Robotics, 2004, p. 91–106.
[Bibtex]@inproceedings{cowancomposing2004, author = {Cowan, Noah J.}, title = {Composing navigation functions on {C}artesian products of manifolds with boundary}, booktitle = {Workshop on the Algorithmic Foundations of Robotics}, publisher = {Springer}, year = 2004, editor = {Michael Erdmann and David Hsu and Mark Overmars and A. Frank van der Stappen}, series = {Springer Tracts in Advanced Robotics}, pages = {91--106} } - G. Lawrence, N. J. Cowan, and S. Russell, “Efficient gradient estimation for motor control learning,” in Proc Conf Uncertainty in Artificial Intelligence, Acapulco, Mexico, 2003.
[Bibtex]@inproceedings{lawrenceefficient2003, author = {Lawrence, Gregory and Cowan, Noah J. and Russell, Stuart}, title = {Efficient gradient estimation for motor control learning}, booktitle = {Proc Conf Uncertainty in Artificial Intelligence}, year = 2003, address = {Acapulco, Mexico} } - N. J. Cowan, O. Shakernia, R. Vidal, and S. Sastry, “Vision-based follow-the-leader,” in Proc IEEE RSJ Int Conf Intell Robots Syst, Las Vegas, NV, 2003, pp. 1796-1801.
[Bibtex]@inproceedings{cowanvision2003, author = {Cowan, Noah J. and Shakernia, Omar and Vidal, Rene and Sastry, Shankar}, title = {Vision-based follow-the-leader}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2003, volume = 2, pages = {1796- 1801}, address = {Las Vegas, NV}, month = oct, organization = {IEEE} } - N. J. Cowan, E. J. Ma, M. Cutkosky, and R. J. Full, “A biologically inspired passive antenna for steering control of a running robot,” in Robotics Research, Siena, Italy, 2003, pp. 540-550.
[Bibtex]@inproceedings{cowanbiologically2003, author = {Cowan, Noah J. and Ma, Emily J. and Cutkosky, Mark and Full, Robert J.}, title = {A biologically inspired passive antenna for steering control of a running robot}, booktitle = {Robotics Research}, publisher = {Springer}, year = 2003, series = {Springer Tracts in Advanced Robotics}, pages = {540-550}, address = {Siena, Italy} } - N. J. Cowan and D. E. Chang, “Toward geometric visual servoing,” in Control Problems in Robotics, Berlin Heidelberg, 2002, p. 233–248.
[Bibtex]@inproceedings{cowantoward2002, author = {Cowan, Noah J. and Chang, Dong E.}, title = {Toward geometric visual servoing}, booktitle = {Control Problems in Robotics}, publisher = {Springer-Verlag}, year = 2002, editor = {A. Bicchi and H. Christensen and D. Prattichizzo}, volume = 4, series = {STAR, Springer Tracks in Advanced Robotics}, pages = {233--248}, address = {Berlin Heidelberg} } - N. J. Cowan, “Binocular visual servoing with a limited field of view,” in Mathematical Theory of Networks and Systems, Notre Dame, Indiana, 2002.
[Bibtex]@inproceedings{cowanbinocular2002, author = {Cowan, Noah J.}, title = {Binocular visual servoing with a limited field of view}, booktitle = {Mathematical Theory of Networks and Systems}, year = 2002, address = {Notre Dame, Indiana}, month = aug } - N. J. Cowan, J. D. Weingarten, and D. E. Koditschek, “Empirical validation of a new visual servoing stragegy,” in Proc Conf Control Applications, Mexico City, 2001, pp. 1117-1123.
[Bibtex]@inproceedings{cowanempirical2001, author = {Cowan, Noah J. and Weingarten, Joel D. and Koditschek, Daniel E.}, title = {Empirical validation of a new visual servoing stragegy}, booktitle = {Proc Conf Control Applications}, year = 2001, pages = {1117-1123}, address = {Mexico City}, doi = {10.1109/CCA.2001.974021} } - N. J. Cowan, G. A. D. Lopes, and D. E. Koditschek, “Rigid body visual servoing using navigation functions,” in Proc IEEE Conf Decis Control, Sydney, Australia, 2000, pp. 3920-3926.
[Bibtex]@inproceedings{cowanrigid2000, author = {Cowan, Noah J. and Lopes, Gabriel A. D. and Koditschek, Daniel E.}, title = {Rigid body visual servoing using navigation functions}, booktitle = {Proc IEEE Conf Decis Control}, year = 2000, pages = {3920-3926}, address = {Sydney, Australia} } - N. J. Cowan and D. E. Koditschek, “Planar image based visual servoing as a navigation problem,” in Proc IEEE Int Conf Robot Autom, Detroit, MI, 1999, pp. 611-617.
[Bibtex]@inproceedings{cowanplanar1999, author = {Cowan, Noah J. and Koditschek, Daniel E.}, title = {Planar image based visual servoing as a navigation problem}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 1999, volume = 1, pages = {611-617}, address = {Detroit, MI} } - N. J. Cowan and D. E. Koditschek, “Toward global visual servos and estimators for rigid bodies,” in Proc IEEE Int Conf Robot Autom, Leuven, Belgium, 1998, pp. 2658-2663.
[Bibtex]@inproceedings{cowantoward1998, author = {Cowan, Noah J. and Koditschek, Daniel E.}, title = {Toward global visual servos and estimators for rigid bodies}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 1998, volume = 3, pages = {2658-2663}, address = {Leuven, Belgium}, doi = {10.1109/ROBOT.1998.680747} }
[ Reviews | Preprints | Journal Articles | Conference Papers | Chapters | Theses | Abstracts | LIMBS Dataverse]
Book Chapters
- S. A. Stamper, M. S. Madhav, N. J. Cowan, and E. S. Fortune, “Using Control Theory to Characterize Active Sensing in Weakly Electric Fishes,” in Electroreception: Fundamental Insights from Comparative Approaches, B. Carlson, J. Sisneros, A. Popper, and R. Fay, Eds., New York: Springer, 2019, vol. 70, p. 227–249.
[Bibtex]@InCollection{stamperusing2019, author = {Stamper, Sarah A. and Madhav, Manu S. and Cowan, Noah J. and Fortune, Eric S.}, title = {Using Control Theory to Characterize Active Sensing in Weakly Electric Fishes}, booktitle = {Electroreception: Fundamental Insights from Comparative Approaches}, publisher = {Springer}, pages={227--249}, year = 2019, editor = {Carlson, BA and Sisneros, JA and Popper, AN and Fay, RR}, volume = 70, series = {Springer Handbook of Auditory Research}, address = {New York} } - N. J. Cowan, K. Goldberg, G. S. Chirikjian, G. Fichtinger, R. Alterovitz, K. B. Reed, V. Kallem, W. Park, S. Misra, and A. M. Okamura, “Robotic Needle Steering: Design, Modeling, Planning, and Image Guidance,” in Surgical Robotics – Systems, Applications, and Visions, J. Rosen, B. Hannaford, and R. Satava, Eds., Springer, 2011, p. 557–582.
[Bibtex]@INCOLLECTION{cowanrobotic2011, author = {Cowan, Noah J. and Goldberg, Ken and Chirikjian, Gregory S. and Fichtinger, Gabor and Alterovitz, Ron and Reed, Kyle B. and Kallem, Vinutha and Park, Wooram and Misra, Sarthak and Okamura, Allison M.}, title = {Robotic Needle Steering: Design, Modeling, Planning, and Image Guidance}, booktitle = {Surgical Robotics -- Systems, Applications, and Visions}, publisher = {Springer}, year = 2011, editor = {J. Rosen and B. Hannaford and R. Satava}, pages = {557--582} } - E. S. Fortune and N. J. Cowan, “Robot Behavior,” in Encyclopedia of Animal Behavior, M. D. Breed and J. Moore, Eds., Academic Press, Oxford, 2010, vol. 3, p. 87–90.
[Bibtex]@INCOLLECTION{fortunerobot2010, author = {Fortune, Eric S. and Cowan, Noah J.}, title = {Robot Behavior}, booktitle = {Encyclopedia of Animal Behavior}, publisher = {Academic Press, Oxford}, year = 2010, editor = {Breed, Michael D. and Moore, Janice}, volume = 3, pages = {87--90} } - J. P. Swensen, V. Kallem, and N. J. Cowan, “Empirical Characterization of Convergence Properties for Kernel-Based Visual Servoing,” in Visual Servoing via Advanced Numerical Methods, Springer, 2010, vol. 401, pp. 23-38.
[Bibtex]@INCOLLECTION{swensenempirical2010, author = {Swensen, John P. and Kallem, Vinutha and Cowan, Noah J.}, title = {Empirical Characterization of Convergence Properties for Kernel-Based Visual Servoing}, booktitle = {Visual Servoing via Advanced Numerical Methods}, publisher = {Springer}, year = 2010, volume = 401, pages = {23-38} } - J. Lee, A. Lamperski, J. Schmitt, and N. J. Cowan, “Task-Level Control of the Lateral Leg Spring Model of Cockroach Locomotion,” in Fast Motions in Biomechanics and Robotics: Optimization and Feedback Control, M. Diehl and K. Mombaur, Eds., Heidelberg: Springer-Verlag, 2006, vol. 340, pp. 167-188.
[Bibtex]@INCOLLECTION{leetask-level2006, author = {Lee, Jusuk and Lamperski, Andrew and Schmitt, John and Cowan, Noah J.}, title = {Task-Level Control of the Lateral Leg Spring Model of Cockroach Locomotion}, booktitle = {Fast Motions in Biomechanics and Robotics: Optimization and Feedback Control}, publisher = {Heidelberg: Springer-Verlag}, year = 2006, editor = {Moritz Diehl and Katja Mombaur}, volume = 340, series = {Lecture Notes in Control and Information Sciences}, pages = {167-188} }
[ Reviews | Preprints | Journal Articles | Conference Papers | Chapters | Theses | Abstracts | LIMBS Dataverse]
Theses & Dissertations
PhD Dissertations
- S. Deng, “Modeling and gait control for principally kinematic locomotion systems,” PhD Thesis, 2023.
[Bibtex]@PHDTHESIS{dengmodeling2023, author = {Deng, Siming}, title = {Modeling and gait control for principally kinematic locomotion systems}, school = {Johns Hopkins University}, year = 2023 } - S. G. Lashkari, “Place cells to path planning: A neural study of complex locomotor behaviors as an inspiration for robotics,” PhD Thesis, 2023.
[Bibtex]@PHDTHESIS{lashkariplace2023, author = {Lashkari, Shahin G.}, title = {Place cells to path planning: A neural study of complex locomotor behaviors as an inspiration for robotics}, school = {Johns Hopkins University}, year = 2023 } - R. P. Jayakumar, “State estimation in complex biological systems,” PhD Thesis, 2019.
[Bibtex]@PHDTHESIS{jayakumarstate2019, author = {Jayakumar, Ravikrishnan P.}, title = {State estimation in complex biological systems}, school = {Johns Hopkins University}, year = 2019 } - R. W. Nickl, “Spatial and Timing Regulation of Upper-Limb Movements in Rhythmic Tasks,” PhD Thesis, 2018.
[Bibtex]@PHDTHESIS{nicklspatial2018, author = {Nickl, Robert W.}, title = {Spatial and Timing Regulation of Upper-Limb Movements in Rhythmic Tasks}, school = {Johns Hopkins University}, year = 2018 } - E. E. Sutton, “Bioelectric Sensing and Navigation: Multimodal Control in Electric Fish and Catheter Navigation,” PhD Thesis, 2017.
[Bibtex]@PHDTHESIS{suttonbioelectric2017, author = {Sutton, Erin E.}, title = {Bioelectric Sensing and Navigation: Multimodal Control in Electric Fish and Catheter Navigation}, school = {Johns Hopkins University}, year = 2017 } - M. M. Ankarali, “Variability, Symmetry, and Dynamics in Human Rhythmic Motor Control,” PhD Thesis, 2015.
[Bibtex]@PHDTHESIS{ankaralivariability2015, author = {Ankarali, M. M.}, title = {Variability, Symmetry, and Dynamics in Human Rhythmic Motor Control}, school = {Johns Hopkins University}, year = 2015, url = {https://jscholarship.library.jhu.edu/handle/1774.2/39519} } - A. Demir, “Bio-inspired Antennal Tactile Sensing,” PhD Thesis, 2015.
[Bibtex]@PHDTHESIS{demirbio-inspired2015, author = {Demir, Alican}, title = {Bio-inspired Antennal Tactile Sensing}, school = {Johns Hopkins University}, year = 2015, url = {https://jscholarship.library.jhu.edu/handle/1774.2/38024} } - S. Sefati, “Modeling Complex Biological and Mechanical Movements: Applications to Animal Locomotion and Gesture Classification in Robotic Surgery,” PhD Thesis, 2014.
[Bibtex]@PHDTHESIS{sefatimodeling2014, author = {Sefati, Shahin}, title = {Modeling Complex Biological and Mechanical Movements: Applications to Animal Locomotion and Gesture Classification in Robotic Surgery}, school = {Johns Hopkins University}, year = {2014}, url = {https://jscholarship.library.jhu.edu/handle/1774.2/39314} } - M. S. Madhav, “Nonlinear Processing of Sensory Interference Drives Social Behavior in Weakly Electric Fish,” PhD Thesis, 2014.
[Bibtex]@PHDTHESIS{madhavnonlinear2014, author = {Madhav, Manu S.}, title = {Nonlinear Processing of Sensory Interference Drives Social Behavior in Weakly Electric Fish}, school = {Johns Hopkins University}, year = 2014, url = {https://jscholarship.library.jhu.edu/handle/1774.2/37059} } - S. A. Stamper, “Making sense: weakly electric fish modulate sensory feedback via social behavior and movement,” PhD Thesis, 2012.
[Bibtex]@PHDTHESIS{stampermaking2012, author = {Stamper, Sarah A.}, title = {Making sense: weakly electric fish modulate sensory feedback via social behavior and movement}, school = {Johns Hopkins University}, year = {2012}, note = {Advisor: E. S. Fortune} } - E. Roth, “Task-level models for image-stabilization behaviors in animals,” PhD Thesis, 2012.
[Bibtex]@PHDTHESIS{rothtask-level2012, author = {Roth, Eatai}, title = {Task-level models for image-stabilization behaviors in animals}, school = {Johns Hopkins University}, year = {2012}, url = {https://catalyst.library.jhu.edu/catalog/bib_4645705} } - V. Kallem, “Vision-Based Control on Lie Groups with Application to Needle Steering,” PhD Thesis, 2008.
[Bibtex]@PHDTHESIS{kallemvision-based2008, author = {Kallem, Vinutha}, title = {Vision-Based Control on Lie Groups with Application to Needle Steering}, school = {Johns Hopkins University}, year = 2008, url = {https://catalyst.library.jhu.edu/catalog/bib_3468412} } - J. P. Swensen, “Torsional Dynamics and Rotational Estimation of Tip-steerable Needles,” PhD Thesis, 2011.
[Bibtex]@PHDTHESIS{swensentorsional2011, author = {Swensen, John P.}, title = {Torsional Dynamics and Rotational Estimation of Tip-steerable Needles}, school = {Johns Hopkins University}, year = 2011, url = {https://catalyst.library.jhu.edu/catalog/bib_4650580} } - J. Lee, “Identifying Feedback Control Strategies of Running Cockroaches and Humans,” PhD Thesis, 2009.
[Bibtex]@PHDTHESIS{leeidentifying2009, author = {Lee, Jusuk}, title = {Identifying Feedback Control Strategies of Running Cockroaches and Humans}, school = {Johns Hopkins University}, year = 2009, url = {https://catalyst.library.jhu.edu/catalog/bib_3522006} } - N. J. Cowan, “Vision-based Control via Navigation Functions,” PhD Thesis, 2001.
[Bibtex]@PHDTHESIS{cowanvision-based2001, author = {Cowan, Noah J.}, title = {Vision-based Control via Navigation Functions}, school = {University of Michigan}, year = 2001, url = {https://deepblue.lib.umich.edu/handle/2027.42/125034} }
MSE Theses
- D. G. Yared, “Learning of Novel Dynamics in Eigenmannia virescens Refuge Tracking Task,” Master Thesis, 2020.
[Bibtex]@MASTERSTHESIS{yaredlearning2020, author = {Yared, Dominic G.}, title = {Learning of Novel Dynamics in Eigenmannia virescens Refuge Tracking Task}, school = {Johns Hopkins University}, year = 2020 } - Y. Yang, “A Comparison of System Identification Techniques for Refuge Tracking Behavior in Eigenmannia virescens,” Master Thesis, 2020.
[Bibtex]@MASTERSTHESIS{yangcomparison2019, author = {Yang, Yu}, title = {A Comparison of System Identification Techniques for Refuge Tracking Behavior in Eigenmannia virescens}, school = {Johns Hopkins University}, year = 2020 } - A. S. S. K. Kunapareddy, “Recovering Observability via Active Sensing,” Master Thesis, 2016.
[Bibtex]@MASTERSTHESIS{kunapareddyrecovering2016, author = {Kunapareddy, Abhinav S. S. K.}, title = {Recovering Observability via Active Sensing}, school = {Johns Hopkins University}, year = 2016, url = {https://jscholarship.library.jhu.edu/handle/1774.2/40233} } - A. De, “Neuromechanical Control of Paddle Juggling,” Master Thesis, 2010.
[Bibtex]@MASTERSTHESIS{deneuromechanical2010, author = {De, Avik}, title = {Neuromechanical Control of Paddle Juggling}, school = {Johns Hopkins University}, year = 2010, url = {https://catalyst.library.jhu.edu/catalog/bib_3985784} } - A. Demir, “A Modular, Tunable Tactile Antenna for Exploring the Mechanics of Sensing,” Master Thesis, 2009.
[Bibtex]@MASTERSTHESIS{demirmodular2009, author = {Demir, Alican}, title = {A Modular, Tunable Tactile Antenna for Exploring the Mechanics of Sensing}, school = {Johns Hopkins University}, year = 2009, url = {https://catalyst.library.jhu.edu/catalog/bib_3985789} }
[ Reviews | Preprints | Journal Articles | Conference Papers | Chapters | Theses | Abstracts | LIMBS Dataverse]
Conference Abstracts
Click here for an incomplete list of abstracts: https://limbs.lcsr.jhu.edu/abstracts