

Sefati et al., PNAS (2013)
Mutually opposing forces during locomotion can eliminate the tradeoff between maneuverability and stability
Proceedings of the National Academy of Sciences (PNAS) ARTICLE #201309300
Shahin Sefati, Izaak D. Neveln, Eatai Roth, Terence R. T. Mitchell, James B. Snyder, Malcolm A. MacIver, Eric S. Fortune, Noah J. Cowan*
*Corresponding author (410-516-5301; ncowan@jhu.edu)
Videos and images:
Images:
Biological experiments are integrated with a computational model and experiments with a biomimetic robot.
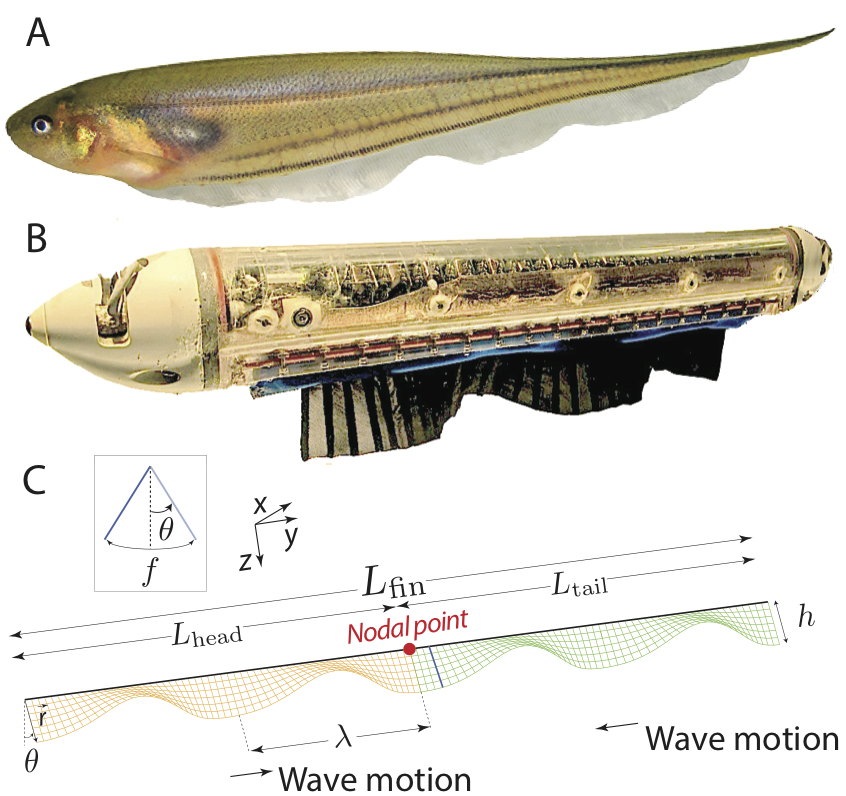
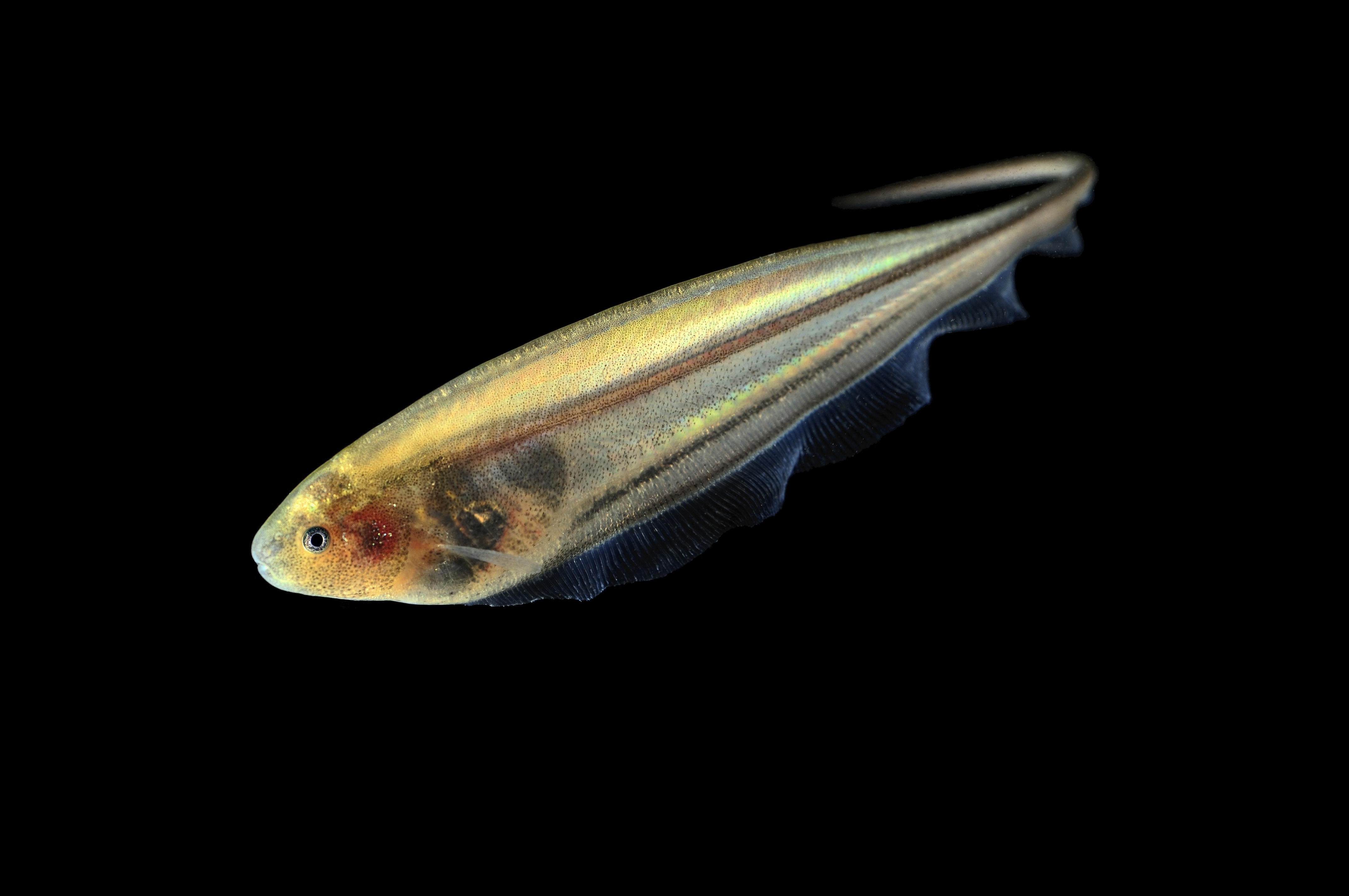
Photo Credit: Will Kirk.
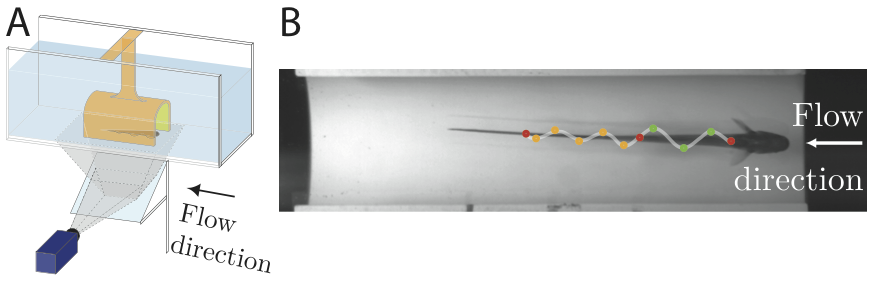
Experimental apparatus.
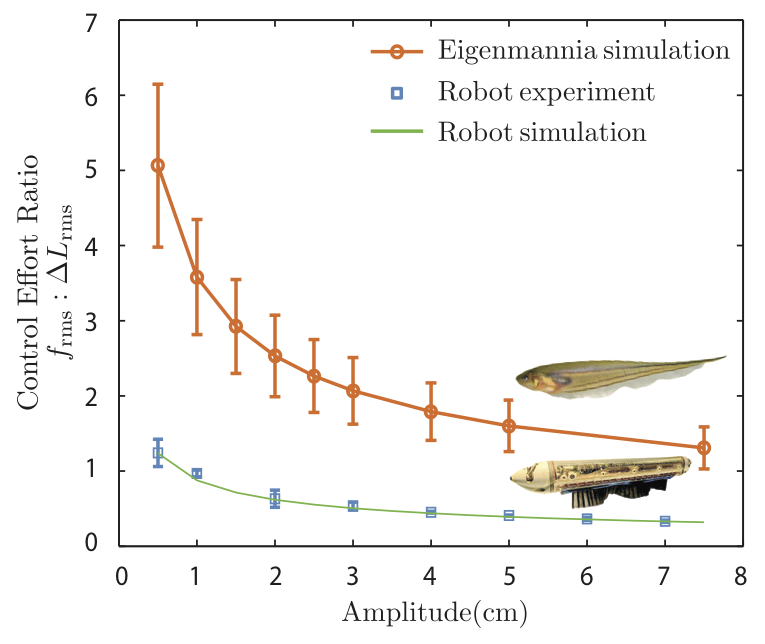
- For small maneuvers, counter-propagating waves requires significantly less control effort than is required for a single traveling wave. We programmed a biomimetic robot to move forward and backward using both strategies. As shown, the relative control effort for a single traveling wave, when compared to counter-propagating waves, goes to infinity as the forward-backward motion amplitude decreases to zero.
Experts in the field not involved in this study:
- Robert J. Full <rjfull@berkeley.edu>, UC Berkeley, 510-642-9896
- Tom Daniel < danielt@uw.edu>, University of Washington, Seattle, 206-543-1659
- George Lauder <Glauder@oeb.harvard.edu>, Harvard, 617-496-7199
JHU press release:
“Scientists Study Some Fishy Behavior to Solve an Animal Locomotion Mystery”
Lead author:
Shahin Sefati
Department of Mechanical Engineering
Johns Hopkins University
Baltimore, MD 21218
Telephone: 410-982-9616
e-mail: shahin@jhu.edu
Corresponding Author:
Noah J. Cowan
Department of Mechanical Engineering
Johns Hopkins University
3400 N. Charles Street, Baltimore, MD 21218, USA
Telephone: 410-516-5301
Fax: 410-516-4316
e-mail: ncowan@jhu.edu
Principle Investigators from Collaborating Universities:
Eric S. Fortune
Department of Biological Sciences
New Jersey Institute of Technology
Newark, NJ 07102-1982 USA
Telephone: 443-312-9610
Fax: 973-596-5689
e-mail: eric.fortune@njit.edu
Malcolm A. MacIver
Department of Biomedical Engineering
Northwestern University
Evanston, IL 60208
Telephone: 847-491-3540
e-mail: maciver@northwestern.edu
Other videos from collaborating laboratories:
1) http://www.youtube.com/watch?v=3LsBse8WKm4
2) http://www.northwestern.edu/newscenter/stories/2011/01/robotic-ghost-knifefish.html