
Chris Yang Receives LINK Foundation Fellowship
Congratulations to Christopher Yang who received at 2019-2020 LINK Foundation Fellowship for Modeling, Simulation, and Training.

Congratulations to Christopher Yang who received at 2019-2020 LINK Foundation Fellowship for Modeling, Simulation, and Training.
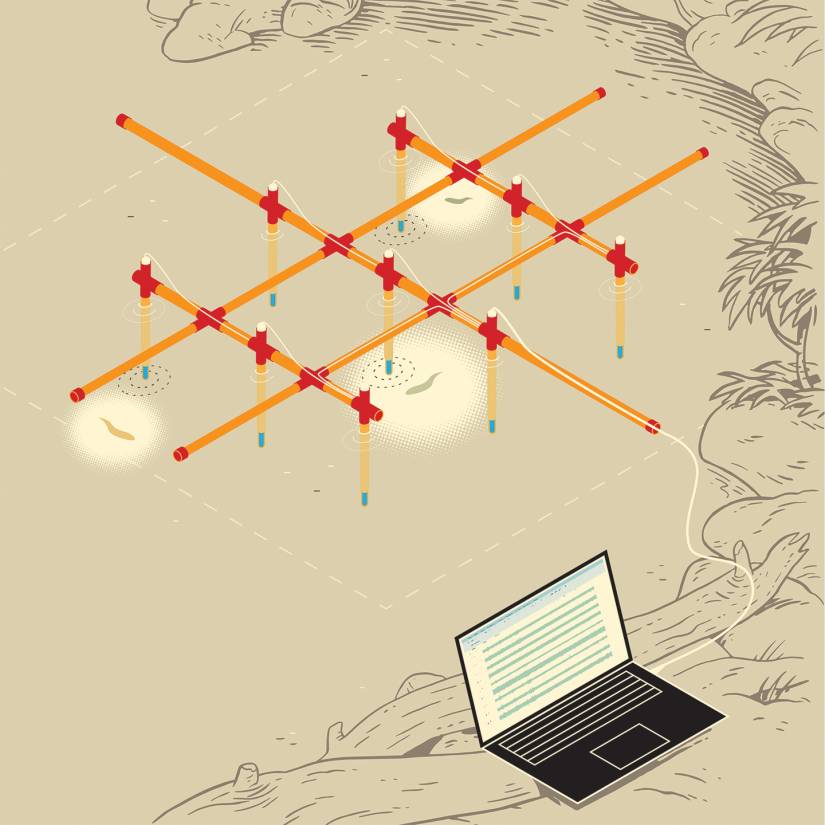
How do you measure the movements and social interactions of exotic tropical fish swimming in the murky waters of the Amazon river basin? LIMBS lab members Dr. Manu Madhav and Ravi Jayakumar developed a new tool to do just that for weakly electric fish. With the help of former lab members Alican Demir and Sarah Stamper and in close collaboration with Dr. Eric Fortune from NJIT, Manu and Ravi developed the “grid”, an array of custom electrodes that sits just below the surface of the water, along with a custom software system that “triangulates” the locations of individual fish. This was featured in the the Johns Hopkins Magazine, Winter 2018 Edition.
The work was published in the open-access journal, Scientific Reports:
![[PDF]](https://limbs.lcsr.jhu.edu/wp-content/plugins/papercite/img/pdf.png)
@article{madhavhigh-resolution2018,
author = {Madhav, Manu S. and Jayakumar, Ravikrishnan P. and Demir, Alican and Stamper, Sarah A. and Fortune, Eric S. and Cowan, Noah J.},
title = {High-resolution behavioral mapping of electric
fishes in Amazonian habitats},
journal = {Sci Rep},
number = 1,
volume = 8,
year = 2018,
pages = {5830},
doi = {10.1038/s41598-018-24035-5},
url = {https://doi.org/10.1038/s41598-018-24035-5}
}
In collaboration with Jim Knierim, professor of neuroscience at the School of Medicine and the Krieger Mind/Brain Institute at Johns Hopkins University, we aim to further our understanding of the hippocampus, a component of the brain that plays a major role in learning, memory, and spatial navigation.The team has recently funding from two NIH grants, as well as a part of a $7.5M Multidisciplinary University Research Initiative (MURI) project spearheaded by Daniel Koditschek (PI). Together the JHU Team’s research grant awards total about $5M to Johns Hopkins University.
Teaming up with Amy Bastian, the LIMBS laboratory has secured funding from the NIH and NSF to investigate visuomotor control in patients with cerebellar ataxia. One of these projects is a collaboration with Jim Freudenberg and Brent Gillespie at the University of Michigan.
Details of current awards to the LIMBS Laboratory
LIMBS Lab summer REU student Brittany Nixon won Second Place out of 15 talks at the annual JHU / LCSR Summer REU Program for her excellent oral presentation entitled “A Mathematical Model of the Fish Tracking Response of the Weakly Electric Glass Knifefish”. Special thanks to her mentor Ismail Uyanik.

Left: A day in the lab. Right: Brittany & Ismail at Brittany’s poster the day before.
Brittany joins a long list of successful REU students from the LIMBS lab!
2010: Rohan Ramesh (1st Place), Rachel Jackson (2nd Place)
2012: Daniel Price (1st Place)
2016: Luke Arend (1st Place)
2018: Brittany Nixon (2nd Place)
Each year, the annual Dynamic Walking Conference continues to be one of my favorite conferences. An incredible mix of smart and creative people. Here I am rambling on about closing the loop on sensorimotor systems. 
Amanda Edwards’s presentation at the OSU MBI Workshop: CONTROL AND MODULATION OF NEURONAL AND MOTOR SYSTEMS, September 12, 2017:
https://mbi.osu.edu/video/player/?id=4343
Abstract: People with damage to their cerebellum often exhibit “reaching ataxia”, or misdirected, poorly scaled movement patterns which are reminiscent of a poorly tuned control system. Ataxia affects most all activities of daily living (e.g. eating, cooking, bathing, dressing, working). It is believed that these patients have a static, miscalibrated internal model of their body dynamics; however, it is unknown whether their feedback control is intact. We challenged these participants with visuomotor system identification tasks in order to model their feedback control architecture. Our results suggest that cerebellar patients have intact feedback control, but are forced to rely on time-delayed visual feedback. The key difference is that healthy subjects seem to be able to compensate for their visuomotor delay suggesting that the cerebellum may be serving the role of a Smith predictor for this task. Finally, we were able to leverage the cerebellar patients intact visuomotor feedback control system to improve the scaling of these movements by altering their visual feedback based on their real-time movement in a virtual reality environment.
Congratulations to Robert Nickl, who defended his thesis today. Robert’s thesis, entitled “Spatial and Timing Regulation of Upper-Limb Movements in Rhythmic Tasks,” uses a virtual juggling paradigm to investigate multisensory control during rhythmic arm movements.
 On October 16, 2017 LIMBS lab member Amanda Edwards defended her PhD dissertation entitled “Feedback Control in the Cerebellum”. Amanda was jointly co-advised by Dr. Amy Bastian.
On October 16, 2017 LIMBS lab member Amanda Edwards defended her PhD dissertation entitled “Feedback Control in the Cerebellum”. Amanda was jointly co-advised by Dr. Amy Bastian.
Here is Amanda discussing the merits of chasing little red dots as a means by which to get a PhD.
CONGRATS AMANDA!

Each year the Society of General Physiology names four students as SGP Scholars, one each from four MBL advanced training courses at Woods Hole. This year, Manu Madhav was selected to receive this honor from the Neural Systems and Behavior course. Congrats Manu!

On July 6, 2016, Erin Sutton successfully defended her PhD Dissertation “Bioelectric Sensing and Navigation: Multimodal Control in Electric Fish and Endovascular Interventions”, becoming the 10th PhD graduate of the LIMBS Laboratory.
Congrats Erin!
