

Human Rhythmic Movement: Control, Timekeeping, and Statistical Modeling
Rhythmicity is omnipresent in the physical and biological worlds, and characterizes life-critical behaviors from the microscopic (e.g. cellular pacemakers) to the whole-organism scales (e.g. locomotion). Human motor control has been widely studied—and is arguably best understood—for discrete goal-directed tasks such as reaching and grasping, which have well-defined start and end points. In contrast, rhythmic movements have much more complicated series of events and often involve intricate, continuous control that relies critically on timekeeping.
For humans, an ability to perform rhythmic motor actions by coordinating motor activity is crucial to walking, running, responding to a fluctuating environment, and even interacting with other people. We seek to understand rhythmic movement and how the human nervous system controls it through a mix of systems theory, virtual reality experiments, and statistical analysis. We apply these tools to an assortment of rhythmic behaviors including juggling, auditory entrainment (i.e. tapping to a rhythm), and walking.
Sensorimotor Control of Human Rhythmic Movement: Paddle Juggling
Paddle juggling, or bouncing a ball upward by rhythmically moving a paddle, has a dynamical structure similar to walking: it involves periods of continuous dynamics (ball flight in juggling:leg swing in walking) that are punctuated by discrete events (ball-paddle collisions in juggling:heel-strike events in walking).
The sense of touch is known to be helpful—and in some cases needed—to initiate and sustain stable rhythmic movements. Why? Interestingly, touch—or haptic—feedback does not appear to increase the rate at which people attain stable juggling patterns, but rather to enhance their tendency to maintain them (a notion called “metastability”).
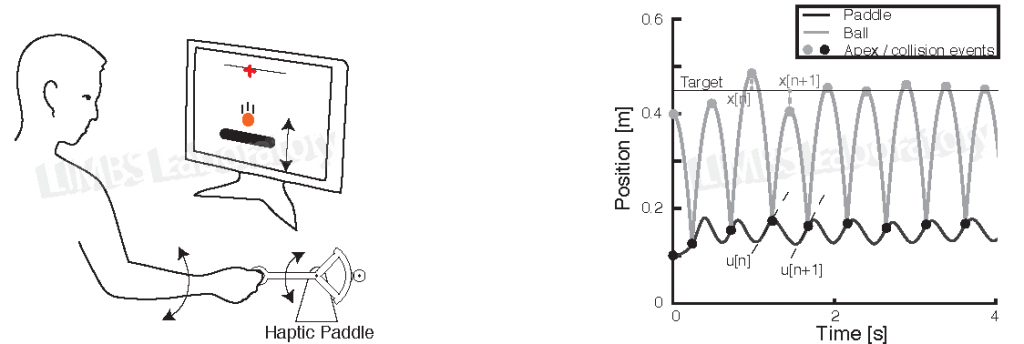
[Adapted from Nickl, et al., Dynamic Walking 2015]
How does the human sensorimotor system process visual and touch cues during juggling? To address this question systematically, we restrict spatial feedback (vision), and haptic and audio signals to specific points in each juggling cycle (see film below). Testing human performance over time under a variety of conditions enables us to use system identification techniques to assess how the human nervous system processes and integrates sensory cues.
Representative Publication:
M. M. Ankarali, H. Tutkun Şen, A. De, A. M. Okamura, and N. J. Cowan. “Haptic feedback enhances rhythmic motor control by reducing variability, not improving convergence rate”. J Neurophysiol, 111(6):1286-1299, 2014. [pdf]
Timekeeping and the Role of the Human “Clock” in Motor Control
Traditionally, control theories assume that timing is perfect: measurements are observed and commands are applied in a deterministic manner. However, biology often violates this assumption: sensory and motor systems in nature are noisy and cannot be timed perfectly. One of our focuses has been the consequences of such imperfect timing.
Despite sources of timing error, humans have the remarkable ability to coordinate “on demand”: for example, to a leader’s instructions during a cooperative task, or to music from a speaker while dancing. We are currently developing systems–level models of how humans entrain to external signals by studying a task where humans tap on a virtual table in time with an metronome, whose characteristics are variable and not a priori known to the participant.
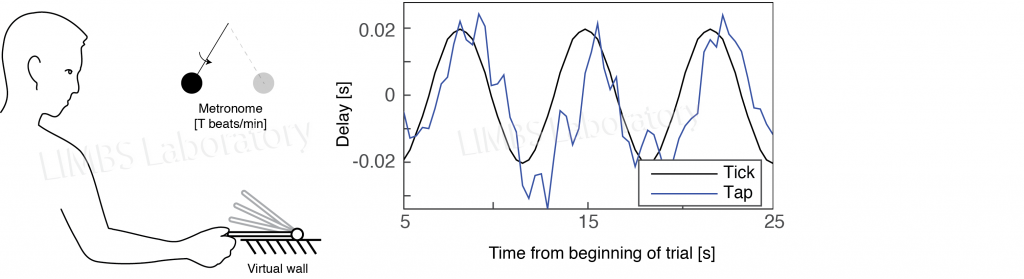
[Adapted from Samson, et al., Society for Neuroscience Meeting 2015]. Note: Pendulum is for illustration and not part of experiment. Participants receive no visual cues.
Representative Publications:
A. Lamperski and N. J. Cowan. “Optimal control with noisy time. IEEE Transactions on Automatic Control” , 61(2):319-333, 2016. Preprint: arXiv:1401.0202.
S. G. Carver, E. S. Fortune, and N. J. Cowan, “ State-estimation and cooperative control with uncertain time“. Proc Amer Control Conf (ACC), Washington, DC, 2013.
Statistical Modeling of Human Walking
The LIMBS lab has studied human locomotion in collaboration with the laboratory of Prof. Amy Bastian (JHU Dept. of Neurology and Kennedy–Krieger Institute).
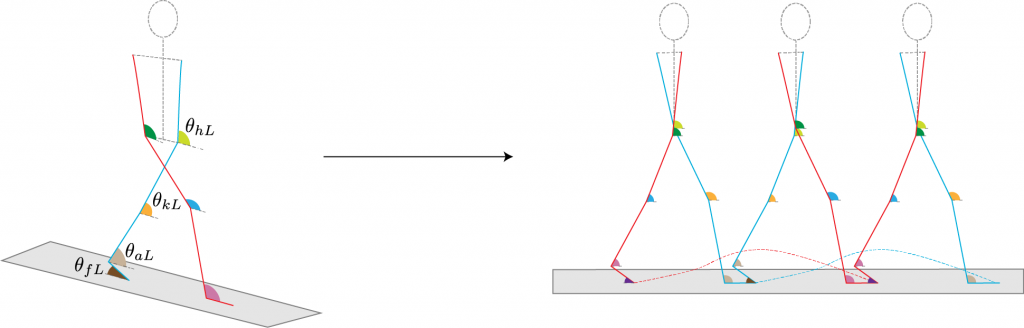
[Adapted from Ankarali, et al., 2015]
In a recent study, human walking symmetry was examined by analyzing joint angles recorded during a previous treadmill walking task. Model fitting based on a variation of traditional cross-validation techniques revealed that while humans exhibit asymmetry between the left- and right-sides of the body during walking, ignoring lateralities can result in statistical models that more accurately predict walking dynamics.
Representative Publication:
M. M. Ankarali, S. Sefati, M. S. Madhav, A. Long, A. J. Bastian, and N. J. Cowan. “Walking dynamics are symmetric (enough)”. J R Soc Interface, 12(108):20150209, 2015. [pdf] [Data and Source Code]
Revised 8/27/2016 by Robert Nickl