

Human Motor Control and Motor Learning
Humans are capable of performing a vast repertoire of movements, from those as simple as tying one’s shoes to those as complex as playing a piano concerto. We, along with several collaborators, are investigating the properties of human movement, how humans learn to generate complex movements, and how neurological disorders impact movement.
Rhythmic Movement: Control, Timekeeping, and Statistical Modeling
Rhythmicity is omnipresent in the physical and biological worlds, and characterizes life-critical behaviors from the microscopic (e.g. cellular pacemakers) to the whole-organism scales (e.g. locomotion). Human motor control has been widely studied—and is arguably best understood—for discrete goal-directed tasks such as reaching and grasping, which have well-defined start and end points. In contrast, rhythmic movements have much more complicated series of events and often involve intricate, continuous control that relies critically on timekeeping.
For humans, the ability to perform rhythmic motor actions by coordinating motor activity is crucial to walking, running, responding to a fluctuating environment, and even interacting with other people. We seek to understand rhythmic movement and how the human nervous system controls it through a mix of systems theory, virtual reality experiments, and statistical analysis. We apply these tools to an assortment of rhythmic behaviors including juggling, auditory entrainment (i.e. tapping to a rhythm), and walking.
[Adapted from Nickl, et al., Dynamic Walking 2015]
Representative Publications
- R. W. Nickl, M. M. Ankarali, and N. J. Cowan. “Complementary spatial and timing control in rhythmic arm movements”. J Neurophysiol, 121(4):1543-1560, 2019. [pdf]
- A. Lamperski and N. J. Cowan. “Optimal control with noisy time. IEEE Transactions on Automatic Control” , 61(2):319-333, 2016. Preprint: arXiv:1401.0202.
- M. M. Ankarali, S. Sefati, M. S. Madhav, A. Long, A. J. Bastian, and N. J. Cowan. “Walking dynamics are symmetric (enough)”. J R Soc Interface, 12(108):20150209, 2015. [pdf] [Data and Source Code]
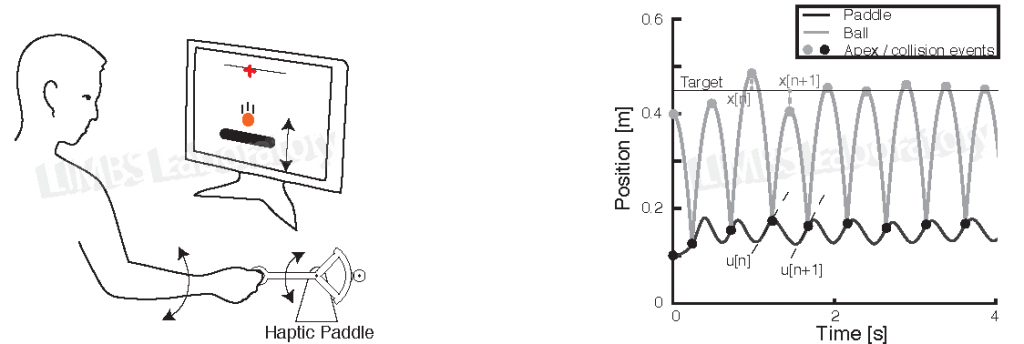
- M. M. Ankarali, H. Tutkun Şen, A. De, A. M. Okamura, and N. J. Cowan. “Haptic feedback enhances rhythmic motor control by reducing variability, not improving convergence rate”. J Neurophysiol, 111(6):1286-1299, 2014. [pdf]
- S. G. Carver, E. S. Fortune, and N. J. Cowan, “ State-estimation and cooperative control with uncertain time“. Proc Amer Control Conf (ACC), Washington, DC, 2013.
De novo learning of complex motor skills
Learning to perform complex motor skills such as gymnastics or ballet requires one to generate novel, unfamiliar patterns of movement. In order to generate these movements, the brain must build new motor controllers from scratch through a process known as de novo learning. Although it is believed that de novo learning is responsible for most real-world skill learning, the vast majority of motor learning research has been focused on investigating adaptation, a learning mechanism that involves adjusting existing motor skills in service of performing a new skill. To advance our understanding of real-world skill learning, we seek to characterize de novo learning’s properties using a combination of behavioral and system identification approaches.
In particular, we are interested in understanding how the brain generates new continuous feedback controllers. Although continuous feedback control is an important element of many skills such as bike riding or juggling, most standard laboratory tasks involve discrete, point-to-point movements that may primarily rely on feedforward control. Thus, little is understood about the extent to which humans can generate continuous feedback controllers de novo. To address this question, we performed experiments where participants were required to use their hands to track a continuously moving target while learning to counter various perturbations of their visual feedback. Through these experiments, we indeed found that humans are capable of acquiring continuous feedback controllers via de novo learning. This work was performed in collaboration with Dr. Adrian Haith in the Brain, Learning, Animation, and Movement Lab.
[Adapted from Yang, et al., bioRXiv 2019]
Representative Publications
- C. S. Yang, N. J. Cowan, and A. M. Haith. “De novo learning versus adaptation of continuous control in a manual tracking task”. bioRXiv, 2020. doi: 10.1101/2020.01.15.906545 [pdf]
Rehabilitation
Patients with cerebellar ataxia are sometimes treated by the addition of mass to the limbs, though this practice has received limited study. Recent work suggests that adding mass to the limbs might have predictable effects on the pattern of cerebellar dysmetria (i.e., over or undershooting) that depends on a hypothesized mismatch between the actual limb inertia and the brain’s estimate of limb inertia. Based on this model, we predicted that addition of mass would only be effective in reducing dysmetria in hypometric patients.
Cerebellar patients were challenged with making a single-joint, single degree of freedom reaching movement while various limb masses were tested. In this task, some single-jointed reaches were improved by adding masses that were optimized in a patient-specific manner. However, this improvement did not translate to multi-joint movements. In multi-joint movements, the “best” patient-specific masses (as determined in a single-joint task) generally exacerbated subjects’ reaching errors. This finding raises questions as to the merits of adding limb weights as a therapy to mitigate the effects of dysmetria.
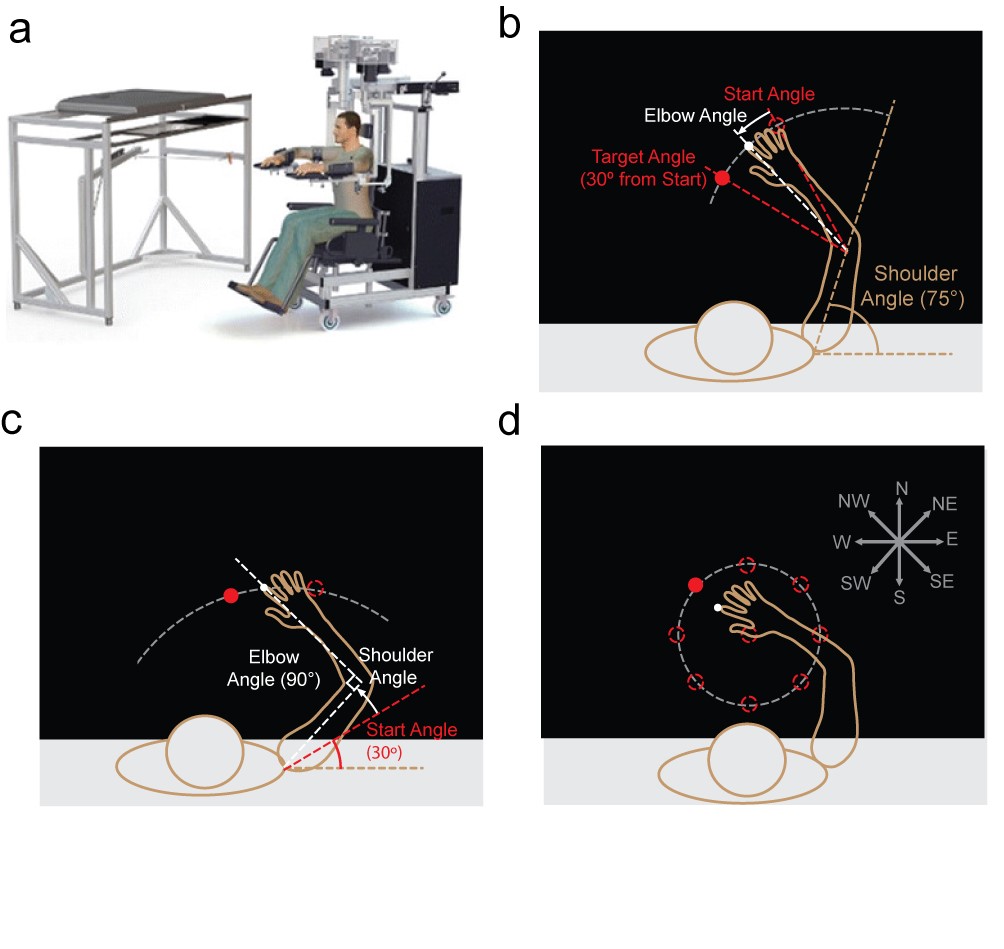
Dashed lines and the arm position are not visible to subjects. a The Kinarm Exoskeleton robot (BKIN Technologies Ltd.) where all experiments took place. b The elbow-only task. c The shoulder-only task. d The eight-target multi-joint task. The compass rose is not visible to the subjects. The compass rose indicates the naming convention for the eight targets.
[Adapted from Zimmet, Cowan and Bastian, 2018, Cerebellum]
Representative Publications
- A. M. Zimmnet, N. J. Cowan and A. J. Bastian, “Patients with Cerebellar Ataxia Do Not Benefit from Limb Weights”, bioRXiv , 2018. doi: 10.1007/s12311-018-0962-1 [pdf]
Sensorimotor processing
It is thought that the brain does not simply react to sensory feedback, but rather uses an internal model of the body to predict the consequences of motor commands before sensory feedback arrives. Time-delayed sensory feedback can then be used to correct for the unexpected—perturbations, motor noise, or a moving target. The cerebellum has been implicated in this predictive control process.
Here we show that the feedback gain in patients with cerebellar ataxia matches that of healthy subjects, but that patients exhibit substantially more phase lag. This difference is captured by a computational model incorporating a Smith predictor in healthy subjects that is missing in patients, supporting the predictive role of the cerebellum in feedback control. Lastly, we improve cerebellar patients’ movement control by altering (phase advancing) the visual feedback they receive from their own self movement in a simplified virtual reality setup.

[Adapted from A. M. Zimmnet, et al., Elife 2020]
Representative Publications
- Zimmet, A. M., Cao, D., Bastian, A. J., & Cowan, N. J. (2020). Cerebellar patients have intact feedback control that can be leveraged to improve reaching. Elife, 9, e53246. [pdf]