

Antenna-Based Tactile Sensing for High-Speed Wall Following
Myriad creatures rely on compliant tactile arrays for locomotion control, mapping, obstacle avoidance and object recognition. Cockroach antennae are complex sensory structures whose mechanical properties are well tuned for certain behavioral tasks. Our laboratory has “reverse engineered” the neuromechanics of cockroach wall following to better understand sensorimotor integration and control in these agile and robust creatures. Along the way, we designed and built tactile sensors—inspired by their biological analogs—both as a model for understanding biological antennae, as well as for furnishing a set of design principles that can guide the development of practice antenna-like sensors in robotics.
Learn more:
- Johns Hopkins Engineering Magazine, 2012: “Bio Bots”
- Science Magazine, 2005: “Scurrying Roaches Outwit Without Their Brains”
- National Geographic News, 2005: “Cockroaches Inspire Robot Antenna Design”
- Inside JEB, 2006: “Keeping Cockroaches On Course”
- Hopkins Gazette, 2005: Owen Loh’s PURA research featured in the Gazette
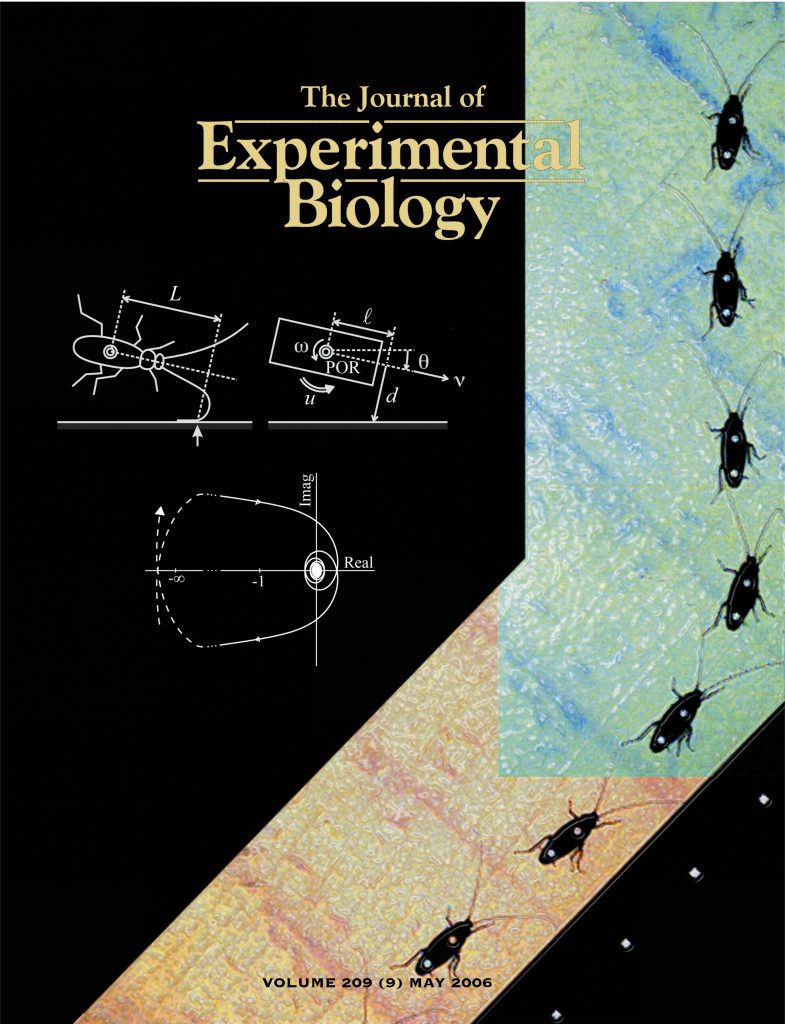
Task-Level Control of Wall Following in Cockroaches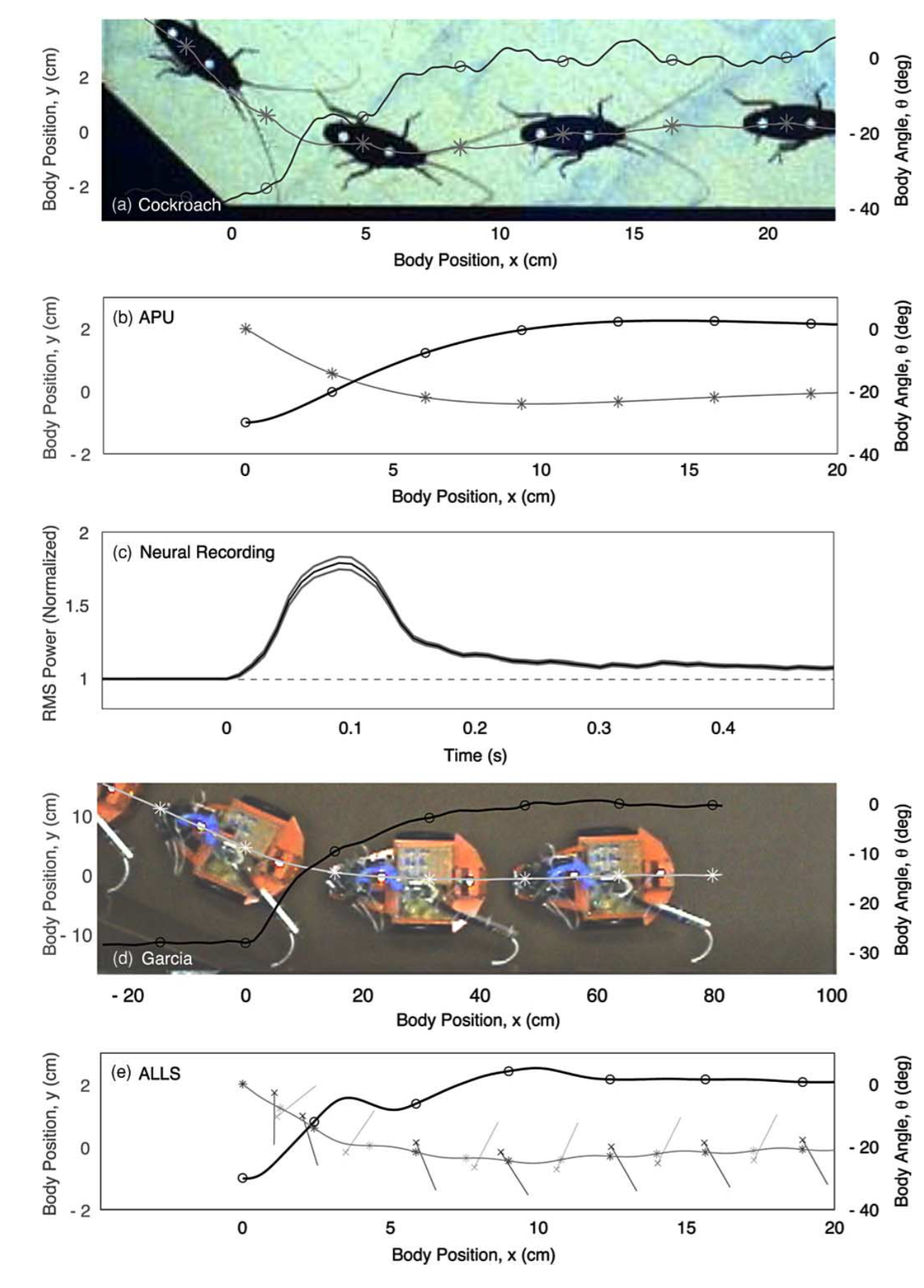
The American cockroach, Periplaneta americana, is reported to follow walls at up to 25 turns/s. During high-speed wall following, a cockroach holds its antenna relatively still at the base while the flagellum bends in response to upcoming protrusions. We developed a simple mechanosensory model for the task-level dynamics of wall following. In the model a torsional, mass-damper system describes the cockroach’s turning dynamics, and a simplified antenna measures distance from the cockroach’s centerline to a wall. Nyquist and root-locus analyses predict that stabilizing neural feedback requires both proportional feedback (“P”, difference between the actual and desired distance to wall) and derivative feedback (“D”, velocity of wall convergence) information from the antenna. These predictions led to electrophysiology in the antennal nerve in which we discovered “P” and “D” correlates.
-
![[PDF]](https://limbs.lcsr.jhu.edu/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](https://limbs.lcsr.jhu.edu/wp-content/plugins/papercite/img/external.png) J. Lee, S. N. Sponberg, O. Y. Loh, A. G. Lamperski, R. J. Full, and N. J. Cowan, “Templates and anchors for antenna-based wall following in cockroaches and robots,” IEEE Trans Robot, vol. 24, iss. 1, p. 130–143, 2008.
J. Lee, S. N. Sponberg, O. Y. Loh, A. G. Lamperski, R. J. Full, and N. J. Cowan, “Templates and anchors for antenna-based wall following in cockroaches and robots,” IEEE Trans Robot, vol. 24, iss. 1, p. 130–143, 2008.
[Bibtex]@ARTICLE{leetemplates2008, author = {Lee, Jusuk and Sponberg, Simon N. and Loh, Owen Y. and Lamperski, Andrew G. and Full, Robert J. and Cowan, Noah J.}, title = {Templates and anchors for antenna-based wall following in cockroaches and robots}, journal = {IEEE Trans Robot}, year = 2008, volume = 24, pages = {130--143}, number = 1, doi = {10.1109/TRO.2007.913981}, url = {https://doi.org/10.1109/TRO.2007.913981} } - N. J. Cowan, J. Lee, and R. J. Full, “Task-level control of rapid wall following in the American cockroach,” J Exp Biol, vol. 209, iss. 9, p. 1617–1629, 2006.
[Bibtex]@ARTICLE{cowantask-level2006, author = {Cowan, Noah J. and Lee, Jusuk and Full, Robert J.}, title = {Task-level control of rapid wall following in the {A}merican cockroach}, journal = {J Exp Biol}, year = 2006, volume = 209, pages = {1617--1629}, number = 9, doi = {10.1242/jeb.02166}, url = {https://doi.org/10.1242/jeb.02166} }
Antenna-based Control of the Lateral Leg Spring (LLS) Model of Cockroach Locomotion
The Lateral Leg Spring (LLS) model was developed by Schmitt and Holmes to model the horizontal-plane dynamics of a running cockroach. The model captures several salient features of real insect locomotion, and demonstrates that horizontal plane locomotion can be passively stabilized by a well-tuned mechanical system, thus requiring minimal neural reflexes. We treat the LLS as a “plant model” and biologically inspired control law that enables the model to follow along a virtual wall, much like antenna-based wall following in cockroaches.
- J. Lee, S. N. Sponberg, O. Y. Loh, A. G. Lamperski, R. J. Full, and N. J. Cowan, “Templates and anchors for antenna-based wall following in cockroaches and robots,” IEEE Trans Robot, vol. 24, iss. 1, p. 130–143, 2008.
[Bibtex]@ARTICLE{leetemplates2008, author = {Lee, Jusuk and Sponberg, Simon N. and Loh, Owen Y. and Lamperski, Andrew G. and Full, Robert J. and Cowan, Noah J.}, title = {Templates and anchors for antenna-based wall following in cockroaches and robots}, journal = {IEEE Trans Robot}, year = 2008, volume = 24, pages = {130--143}, number = 1, doi = {10.1109/TRO.2007.913981}, url = {https://doi.org/10.1109/TRO.2007.913981} } - J. Lee, O. Y. Loh, and N. J. Cowan, “A hierarchy of neuromechanical and robotic models of antenna-based wall following in cockroaches,” in Proc IEEE RSJ Int Conf Intell Robots Syst, San Diego, CA, USA, 2007, pp. 3547-3553.
[Bibtex]@inproceedings{leehierarchy2007, author = {Lee, Jusuk and Loh, Owen Y. and Cowan, Noah J.}, title = {A hierarchy of neuromechanical and robotic models of antenna-based wall following in cockroaches}, booktitle = {Proc IEEE RSJ Int Conf Intell Robots Syst}, year = 2007, pages = {3547-3553}, address = {San Diego, CA, USA}, month = oct } - J. Lee, A. Lamperski, J. Schmitt, and N. J. Cowan, “Task-Level Control of the Lateral Leg Spring Model of Cockroach Locomotion,” in Fast Motions in Biomechanics and Robotics: Optimization and Feedback Control, M. Diehl and K. Mombaur, Eds., Heidelberg: Springer-Verlag, 2006, vol. 340, pp. 167-188.
[Bibtex]@INCOLLECTION{leetask-level2006, author = {Lee, Jusuk and Lamperski, Andrew and Schmitt, John and Cowan, Noah J.}, title = {Task-Level Control of the Lateral Leg Spring Model of Cockroach Locomotion}, booktitle = {Fast Motions in Biomechanics and Robotics: Optimization and Feedback Control}, publisher = {Heidelberg: Springer-Verlag}, year = 2006, editor = {Moritz Diehl and Katja Mombaur}, volume = 340, series = {Lecture Notes in Control and Information Sciences}, pages = {167-188} }
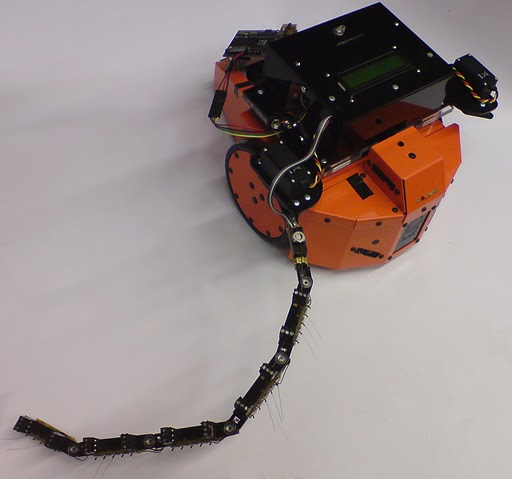
Effects of Passive Antennal Reconfiguration During Wall Following in Cockroaches
We discovered that the passive antennal flagellum of cockroach Periplaneta americana can assume two principal mechanical states, such that the tip is either projecting backward or forward. Using a combination of behavioral and robotic experiments, we demonstrate that a switch in the antenna’s state is mediated via the passive interactions between the sensor and its environment, and this switch strongly influences wall-tracking control. When the tip of the antenna is projected backward, the animals maintain greater body-to-wall distance with fewer body collisions and less leg–wall contact than when the tip is projecting forward. We performed laser ablation of chemo-mechanosensory hairs and added artificial hairs to a robotic antenna through and showed that distally pointing mechanosensory hairs at the tip of the antenna mediate the switch in state by interlocking with asperities in the wall surface. Antennal hairs, once thought to only play a role in sensing, are sufficient for mechanically reconfiguring the state of the entire antenna when coupled with forward motion.
- J. Mongeau, A. Demir, C. J. Dallmann, K. Jayaram, N. J. Cowan, and R. J. Full, “Mechanical processing via passive dynamic properties of the cockroach antenna can facilitate control during rapid running,” J Exp Biol, vol. 217, iss. 18, p. 3333–3345, 2014.
[Bibtex]@article{mongeaumechanical2014, title = {Mechanical processing via passive dynamic properties of the cockroach antenna can facilitate control during rapid running}, journal = {J Exp Biol}, author = {Mongeau, Jean-Michel and Demir, Alican and Dallmann, Chris J. and Jayaram, Kaushik and Cowan, Noah J. and Full, Robert J.}, year = 2014, volume = 217, number = 18, pages = {3333--3345}, doi = {10.1242/jeb.101501}, url = {https://doi.org/10.1242/jeb.101501}, } - J. Mongeau, A. Demir, J. Lee, N. J. Cowan, and R. J. Full, “Locomotion- and mechanics-mediated tactile sensing: antenna reconfiguration simplifies control during high-speed navigation in cockroaches,” J Exp Biol, vol. 216, iss. 24, p. 4530–4541, 2013.
[Bibtex]@article{mongeaulocomotion2013, author = {Mongeau, Jean-Michel and Demir, Alican and Lee, Jusuk and Cowan, Noah J. and Full, Robert J.}, title = {Locomotion- and mechanics-mediated tactile sensing: antenna reconfiguration simplifies control during high-speed navigation in cockroaches}, journal = {J Exp Biol}, volume = 216, number = 24, pages = {4530--4541}, year = 2013, doi = {10.1242/jeb.083477}, url = {https://doi.org/10.1242/jeb.083477} } - A. Demir, E. W. Samson, and N. J. Cowan, “A tunable physical model of arthropod antennae,” in Proc IEEE Int Conf Robot Autom, Anchorage, AK, USA, 2010, pp. 3793-3798.
[Bibtex]@inproceedings{demirtunable2010, author = {Demir, Alican and Samson, Edward W. and Cowan, Noah J.}, title = {A tunable physical model of arthropod antennae}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2010, pages = {3793-3798}, address = {Anchorage, AK, USA}, month = may, doi = {10.1109/ROBOT.2010.5509323}, url = {https://doi.org/10.1109/ROBOT.2010.5509323} }
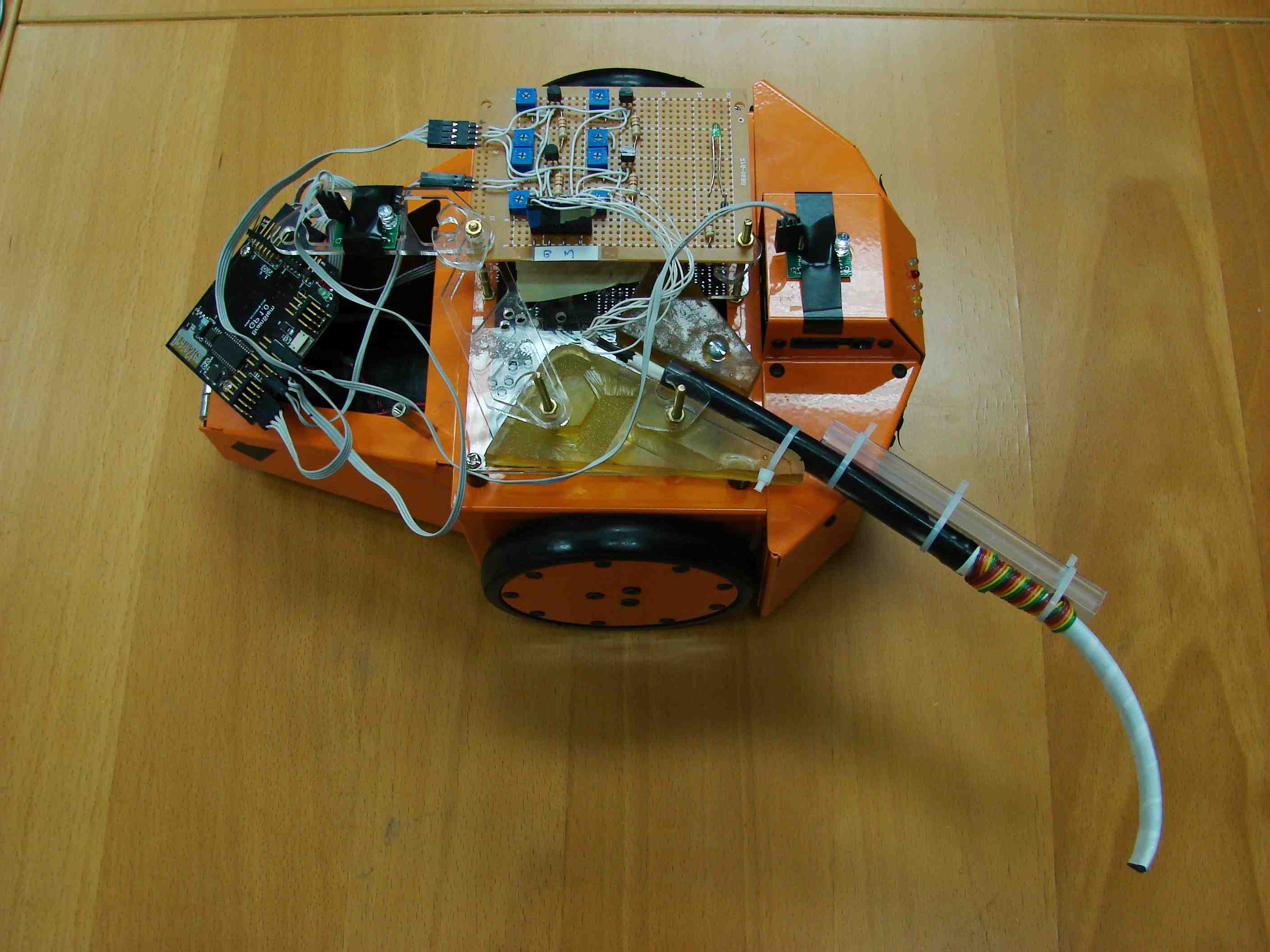
Biologically Inspired Tactile Sensing
Like their biological analogs, robotic tactile sensors should enable their host to negotiate cluttered environments in low light. These multifunctional, light weight, low power, “quiet” sensors complement existing proximity sensors, particularly in low-light, tight spaces with highly polished surfaces and high air- or water-particle content, where modalities such as infrared, sonar, vision and lasers fail. Inspired by the cockroach antennae we are developing the next generation tactile sensors.
- A. Demir, E. W. Samson, and N. J. Cowan, “A tunable physical model of arthropod antennae,” in Proc IEEE Int Conf Robot Autom, Anchorage, AK, USA, 2010, pp. 3793-3798.
[Bibtex]@inproceedings{demirtunable2010, author = {Demir, Alican and Samson, Edward W. and Cowan, Noah J.}, title = {A tunable physical model of arthropod antennae}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2010, pages = {3793-3798}, address = {Anchorage, AK, USA}, month = may, doi = {10.1109/ROBOT.2010.5509323}, url = {https://doi.org/10.1109/ROBOT.2010.5509323} } - A. Lamperski, O. Loh, B. Kutscher, and N. J. Cowan, “Dynamical wall-following for a wheeled robot using a passive tactile sensor,” in Proc IEEE Int Conf Robot Autom, 2005, pp. 3838-3843.
[Bibtex]@inproceedings{lamperskidynamical2005, author = {Lamperski, Andrew and Loh, Owen and Kutscher, Brett and Cowan, Noah J.}, title = {Dynamical wall-following for a wheeled robot using a passive tactile sensor}, booktitle = {Proc IEEE Int Conf Robot Autom}, year = 2005, pages = {3838-3843} } - N. J. Cowan, E. J. Ma, M. Cutkosky, and R. J. Full, “A biologically inspired passive antenna for steering control of a running robot,” in Robotics Research, Siena, Italy, 2003, pp. 540-550.
[Bibtex]@inproceedings{cowanbiologically2003, author = {Cowan, Noah J. and Ma, Emily J. and Cutkosky, Mark and Full, Robert J.}, title = {A biologically inspired passive antenna for steering control of a running robot}, booktitle = {Robotics Research}, publisher = {Springer}, year = 2003, series = {Springer Tracts in Advanced Robotics}, pages = {540-550}, address = {Siena, Italy} }


Review paper
- N. J. Cowan, M. M. Ankarali, J. P. Dyhr, M. S. Madhav, E. Roth, S. Sefati, S. Sponberg, S. A. Stamper, E. S. Fortune, and T. L. Daniel, “Feedback Control as a Framework for Understanding Tradeoffs in Biology,” Integr Comp Biol, vol. 54, iss. 2, pp. 223-237, 2014.
[Bibtex]@article{cowanfeedback2014, author = {Cowan, Noah J. and Ankarali, M. Mert and Dyhr, Jonathan P. and Madhav, Manu S. and Roth, Eatai and Sefati, Shahin and Sponberg, Simon and Stamper, Sarah A. and Fortune, Eric S. and Daniel, Tom L.}, title = {Feedback Control as a Framework for Understanding Tradeoffs in Biology}, journal = {Integr Comp Biol}, volume = 54, number = 2, pages = {223-237}, year = 2014, doi = {10.1093/icb/icu050}, url = {https://doi.org/10.1093/icb/icu050} }